
CAN
介绍CAN的配置和调试方式
模块介绍
CAN(Controller Area Network,控制器局域网络)是一种用于控制器和设备之间进行通信的串行通信协议。主要用于汽车工业,工业自动化、医疗设备、航空航天、机器人等多个领域。
功能介绍
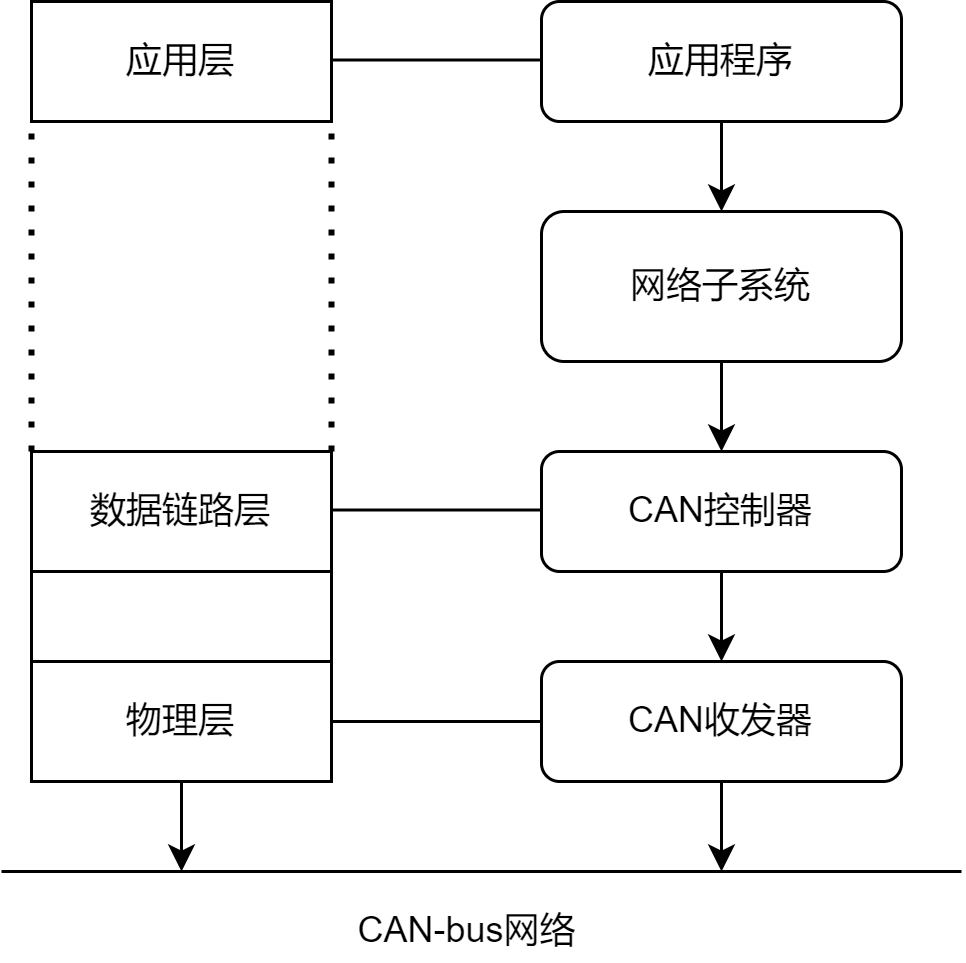
can控制器实现了基于CAN2.0和CANFD协议的报文收发,包括标准数据帧,标准远程帧,扩展数据帧等。can驱动通过网络设备接口注册为网络设备。在用户层可以通过指定网络工具或接口完成can驱动调用实现报文收发。
源码结构介绍
CAN控制器驱动代码在drivers/net/can目录下:
drivers/net/can
|--dev.c #内核can框架代码,包含计算波特率参数,注册can设备等
|--flexcan/ #k1 can驱动
|--flexcan-core.c
|--flexcan.h
关键特性
特性
| 特性 | 特性说明 |
|---|---|
| 支持CANFD | 支持CANFD协议,兼容CAN2.0 |
| 支持最大64B数据 | CANFD协议支持8,16,32,64B数据传输 |
性能参数
支持最高8M数据域波特率
配置介绍
主要包括驱动使能配置和dts配置
CONFIG配置
CONFIG_CAN_DEV 此为内核平台can框架提供支持,支持k1 can驱动情况下,应为Y
Symbol: CAN_DEV [=y]
Device Drivers
-> Network device support (NETDEVICES [=y])
-> CAN Device Drivers (CAN_DEV [=y])
在支持平台层can框架后,配置CONFIG_CAN_FLEXCAN为Y,支持k1 can驱动
Symbol: CAN_FLEXCAN [=y]
-> CAN device drivers with Netlink support (CAN_NETLINK [=y])
-> Support for Freescale FLEXCAN based chips (CAN_FLEXCAN [=y])
dts配置
在k1平台,can控制器部分不包含收发器,控制器对外的接口为TX和RX
pinctrl
可查看linux仓库的arch/riscv/boot/dts/spacemit/k1-x_pinctrl.dtsi,参考已配置好的can节点配置,如下:
pinctrl_can_0: can_0_grp {
pinctrl-single,pins = <
K1X_PADCONF(GPIO_75, MUX_MODE3, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* can_tx0 */
K1X_PADCONF(GPIO_76, MUX_MODE3, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* can_rx0 */
>;
};
dtsi配置示例
dtsi中配�置can控制器基地址和时钟复位资源,正常情况无需改动
flexcan0: fdcan@d4028000 {
compatible = "spacemit,k1x-flexcan";
reg = <0x0 0xd4028000 0x0 0x4000>;
interrupts = <16>;
interrupt-parent = <&intc>;
clocks = <&ccu CLK_CAN0>,<&ccu CLK_CAN0_BUS>;
clock-names = "per","ipg";
resets = <&reset RESET_CAN0>;
fsl,clk-source = <0>;
status = "disabled";
};
dts配置示例
dts完整配置,如下所示 可选择配置时钟频率为20M,40M,80M以支持不同波特率
/*can0*/
&flexcan0 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_can_0>;
clock-frequency = <80000000>;
status = "okay";
};
/*rcan*/
&r_flexcan {
pinctrl-names = "default";
clock-frequency = <80000000>;
status = "okay";
pinctrl-0 = <&pinctrl_r_can_0>;
};
接口描述
API介绍
can驱动主要实现了发送接收报文的接口 常用:
static int flexcan_open(struct net_device *dev)
开启can设备时调用
static netdev_tx_t flexcan_start_xmit(struct sk_buff *skb, struct net_device *dev)
can设备开始传输时调用 配置can传输时波特率的参数为初始化驱动时保存在驱动私有数据结构体中
Demo示例
Debug介绍
1.查看can设备是否加载成功
ifconfig -a
2.k1配置can的仲裁域和数据��域波特率
ip link set can0 type can bitrate 125000 dbitrate 250000 berr-reporting on fd on
3.打开can设备(同时另一端准备接收)
ip link set can0 up
4.k1端发送报文
cansend格式:cansend can-dev id#data
eg:cansend can0 123##3.11223344556677881122334455667788aabbccdd
5.k1端接收报文(另一端发送)
candump can0
测试介绍
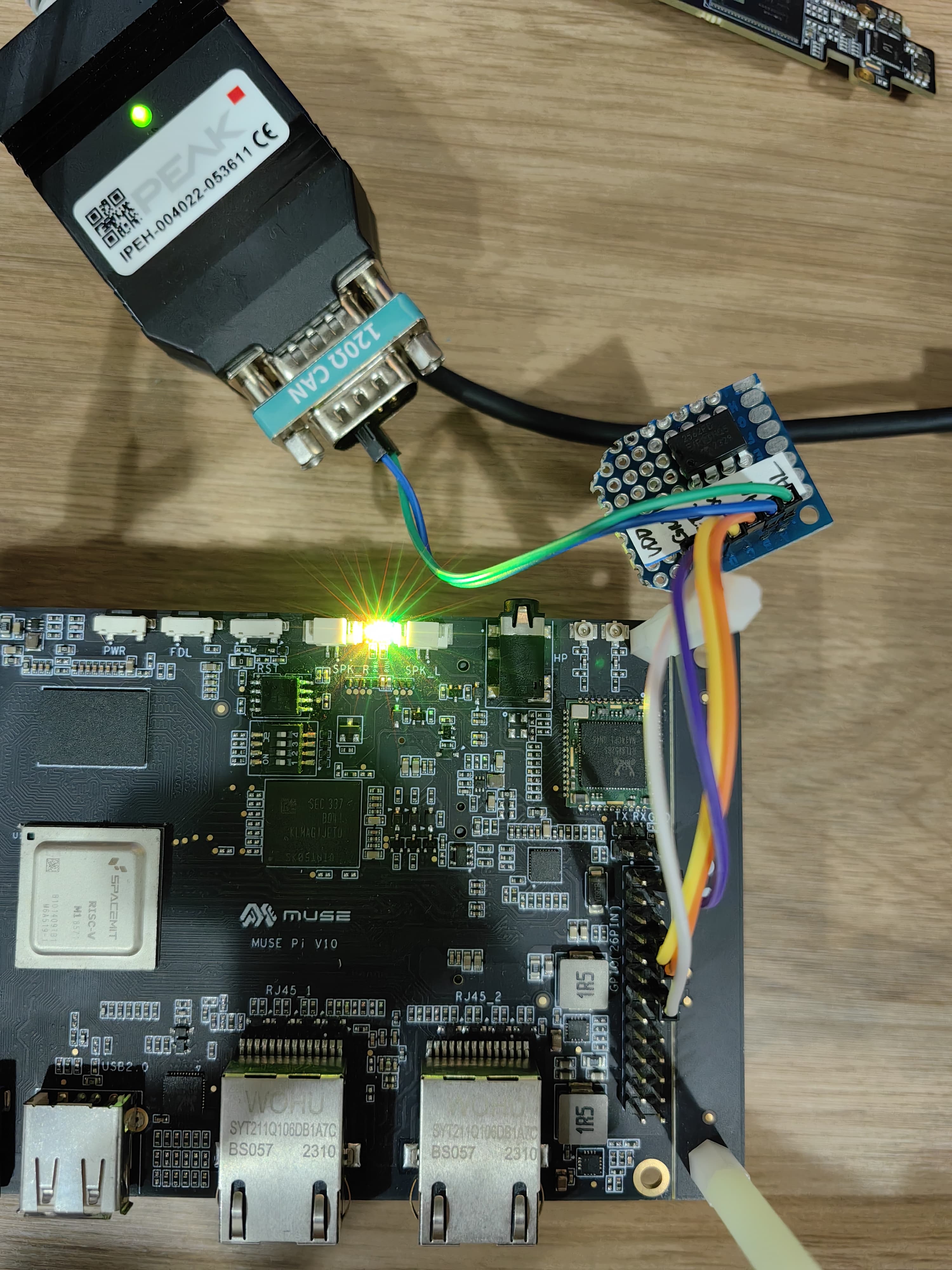
基于k1平台可以外接can收发器进行测试,通讯的另一端一般选择USBCAN分析仪连接电脑模拟can设备,由于通信的另一端设备和用法不确定,这里主要介绍k1 的测试用法。以下将以MUSE Pi开发板为例,基于bianbu-linux系统做demo演示,dts配置请参考dts配置示例章节。
- 基于MUSE Pi连接can设备
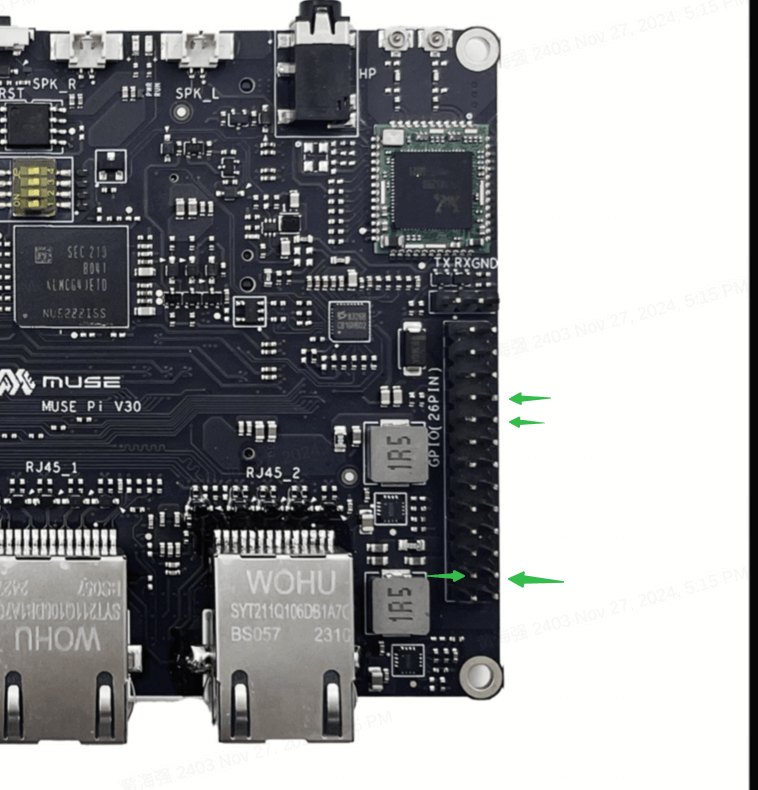
pin脚方向如上图所示,从上往下的绿色箭头,分别为 rcan tx(gpio47, 26 pin接口的8pin)、rcan rx(gpio48, 26 pin接口的10pin); can0 tx(gpio75, 26 pin接口的23pin)、can0 rx(gpio 76,26 pin接口的24pin)
- pc端安装can软件,以及接入pc can(可以接入两个can外设相互收发)。本次使用的是PEAK的PC can,PEAK官网 下图所示为rcan的接线,can0的接线类似。
- 查看can设备是否加载成功
# ifconfig -a
can0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Interrupt:77
can1 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
inet addr:169.254.185.103 Mask:255.255.0.0
UP RUNNING NOARP MTU:72 Metric:1
RX packets:4226044 errors:1411370 dropped:0 overruns:0 frame:1411370
TX packets:1428220 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:50946992 (48.5 MiB) TX bytes:28564400 (27.2 MiB)
Interrupt:255
- k1配置can的仲裁域和数据域波特率,两个can设备必须要配置成相同的仲裁、数据波特率才能正常收发数据。
ip link set can1 up type can bitrate 4000000 sample-point 0.75 dbitrate 8000000 sample-point 0.8 fd on
#接收数据
candump can1
- 打开另外一个can设备作为数据发送端(可以是pc can,也可以是开发板的另外一个can设备,这里以另外一个can设备发送数据,PC can可自行验证)
cansend can1 456##3.8877665544332211aabbccddeeffaabbaabb
- 停止can设备
ifconfig can1 down
FAQ
- 在MUSE-Pi开发版调试rcan,需要关闭以下的dts引脚配置
diff --git a/arch/riscv/boot/dts/spacemit/k1-x_MUSE-Pi.dts b/arch/riscv/boot/dts/spacemit/k1-x_MUSE-Pi.dts
index 9107d43c3091..a34272ce8318 100644
--- a/arch/riscv/boot/dts/spacemit/k1-x_MUSE-Pi.dts
+++ b/arch/riscv/boot/dts/spacemit/k1-x_MUSE-Pi.dts
@@ -578,12 +578,12 @@ &range GPIO_124 1 (MUX_MODE0 | EDGE_NONE | PULL_UP | PAD_1V8_DS2)
&range GPIO_125 3 (MUX_MODE0 | EDGE_NONE | PULL_DOWN | PAD_1V8_DS2)
>;
- pinctrl_rcpu: pinctrl_rcpu_grp {
- pinctrl-single,pins = <
- K1X_PADCONF(GPIO_47, MUX_MODE1, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* r_uart0_tx */
- K1X_PADCONF(GPIO_48, MUX_MODE1, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /* r_uart0_rx */
- >;
- };
+ /* pinctrl_rcpu: pinctrl_rcpu_grp { */
+ /* pinctrl-single,pins = < */
+ /* K1X_PADCONF(GPIO_47, MUX_MODE1, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /1* r_uart0_tx *1/ */
+ /* K1X_PADCONF(GPIO_48, MUX_MODE1, (EDGE_NONE | PULL_UP | PAD_3V_DS4)) /1* r_uart0_rx *1/ */
+ /* >; */
+ /* }; */
pinctrl_gmac0: gmac0_grp {
pinctrl-single,pins =<
@@ -1062,7 +1062,7 @@ &vi {
&rcpu {
pinctrl-names = "default";
- pinctrl-0 = <&pinctrl_rcpu>;
+ /* pinctrl-0 = <&pinctrl_rcpu>; */
mboxes = <&mailbox 0>, <&mailbox 1>;
mbox-names = "vq0", "vq1";
memory-region = <&rcpu_mem_0>, <&vdev0vring0>, <&vdev0vring1>, <&vdev0buffer>, <&rsc_table>, <&rcpu_mem_snapshots>;