ROS2 安装
由于ROS2官方没有提供基于risc-v的ROS2的安装包,所以需要自己编译安装。以下就是在K1上安装ROS2的全过程,首先你需要在虚拟机中至少有25GB的硬盘空间来从源代码安装ROS 2。在继续之前,请确保你有足够的空间。
系统设置
设置地区
这与官方说明中的步骤完全相同:
locale # 检查UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # 验证设置
启用所需的软件库
sudo apt install software-properties-common
sudo add-apt-repository universe
安装依赖
好的,我们尝试安装所有必需的东西,但不使用ros-dev-tools。我们将使用apt和pip:
sudo apt update && sudo apt upgrade && sudo apt install -y \
build-essential \
cmake \
git \
apt-utils \
ca-certificates \
conntrack \
curl \
dh-python \
dhcpcd5 \
ebtables \
ethtool \
git-lfs \
gnupg2 \
ifupdown \
iptables \
iproute2 \
iputils-ping \
libasio-dev \
libbullet-dev \
libconsole-bridge-dev \
libtinyxml2-dev \
libeigen3-dev \
lsb-release \
net-tools \
openssh-client \
python3-dev \
python3-distlib \
python3-empy \
python3-lark \
python3-notify2 \
python3-numpy \
python3-pip \
python3-pytest-cov \
python3-setuptools \
python3-yaml \
samba \
socat \
systemd \
vim \
wget
注意:可能我们并不需要所有这些依赖项。你可以随意选择一些不安装(并且和我们分享 )
仍然有一些依赖项在没有ROS 2软件库的情况下是无法获得的。我们使用pip来安装它们:
sudo pip install vcstool \
rosdep \
catkin-pkg-modules \
rosdistro-modules \
colcon-common-extensions
到目前为止一切顺利。让我们继续构建ROS 2。
注意:
如果你不能正常安装这些依赖,可以使用apt来安装其中的一些依赖,但需要先添加一个ubuntu ports的source.list,如下所示:
/etc/apt/sources.list.d/ubuntu.list
deb http://ports.ubuntu.com/ubuntu-ports/ mantic main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ mantic main restricted universe multiverse
deb http://ports.ubuntu.com/ubuntu-ports/ mantic-updates main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ mantic-updates main restricted universe multiverse
deb http://ports.ubuntu.com/ubuntu-ports/ mantic-backports main restricted universe multiverse
# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ mantic-backports main restricted universe multiverse
# 以下安全更新软件源包含了官方源与镜像站配置,如有需要可自行修改注释切换
deb http://ports.ubuntu.com/ubuntu-ports/ mantic-security main restricted universe multiverse
# deb-src http://ports.ubuntu.com/ubuntu-ports/ mantic-security main restricted universe multiverse
# 预发布软件源,不建议启用
deb http://ports.ubuntu.com/ubuntu-ports/ mantic-proposed main restricted universe multiverse
# # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ mantic-proposed main restricted universe multiverse
添加之后我们就有两个源,分别是bianbu.list和ubuntu.list
然后使用apt命令安装部分pip安装不了的依赖:
sudo apt-get install python3-catkin-pkg
sudo apt-get install python3-rosdistro
sudo apt install vcstool
构建ROS 2
获取ROS 2代码
与官方文档中的步骤相同:
mkdir -p ~/ros2/ros2_iron/src
cd ~/ros2/ros2_iron
vcs import --input https://raw.githubusercontent.com/ros2/ros2/iron/ros2.repos src
如果你遇到错误 "Failed to connect to raw.githubusercontent.com port 443 after 13 ms: Connection refused",你可以参考 https://www.guyuehome.com/37844 处理方法:
sudo vi /etc/hosts
#####################
127.0.0.1 localhost
127.0.1.1 iron-virtual-machine
### 添加以下解析
185.199.108.133 raw.githubusercontent.com
使用rosdep安装依赖
这里开始变得有点棘手:
sudo rosdep init
rosdep update
rosdep install -r --from-paths src --ignore-src -y --skip-keys "fastcdr rti-connext-dds-6.0.1 urdfdom_headers"
仔细看:我添加了 -r 选项来忽略失败。rosdep假设我们有访问ROS库的权限并使用apt来安装一些依赖。apt在寻找一些依赖时会失败。幸运的是,我们之前已经使用pip下载了它们。无论如何,rosdep会打印出失败的软件包,所以你可以在之前使用pip安装过的软件包中进行双重检查,确保我们可以继续进行。
注意:如果你使用的是基于Ubuntu的发行版(如Linux Mint)但不识别为Ubuntu,你会得到一个错误消息 Unsupported OS [bianbu]。在这种情况下,将 --os=ubuntu:jammy 附加到上面的命令。
在工作区构建代码
我现在正卡在这里。如果你运行以下命令:
colcon build --symlink-install
它开始构建一些依赖项……但最终会因为mimick_vendor而失败。本质上,mimick_vendor试图编译Mimick包4,该包不支持risc-v架构。然而,这个包的原始分支有一个开放的PR 5确实提供了对RISC-V的支持。遗憾的是,作者似乎不太活跃。不过,我已经开了几个问题,询问ROS 2 Mimick的维护者添�加这个功能。
从现在开始,我将调整ROS依赖列表指向提供risc-v支持的这个分支,并看看我是否可以继续安装。我会随时更新。
正如我之前提到的,Mimick库不支持risc-v 64架构。但是,GitHub用户@ziyao233帮助了我并打开了一个PR来修复这个问题(非常感谢!)。因此,在构建代码之前,我们必须调整mimick_vendor依赖项:
vi ~/ros2_iron/src/ros2/mimick_vendor/CMakeLists.txt
# 转到第61行,并将提交哈希修改为 https://github.com/ziyao233/Mimick/tree/ros2-fixed:
set(mimick_version "90d02296025f38da2e33c67b02b7fa0c7c7d460c")
# 转到第63行,并将git仓库修改为 https://github.com/ziyao233/Mimick:
GIT_REPOSITORY https://github.com/ziyao233/Mimick.git
我们现在准备就绪。
colcon build --symlink-install
设置环境
source ~/ros2/ros2_iron/install/local_setup.bash
尝试一些示例
如果你安装了ros-foxy-desktop,你可以尝试一些示例。
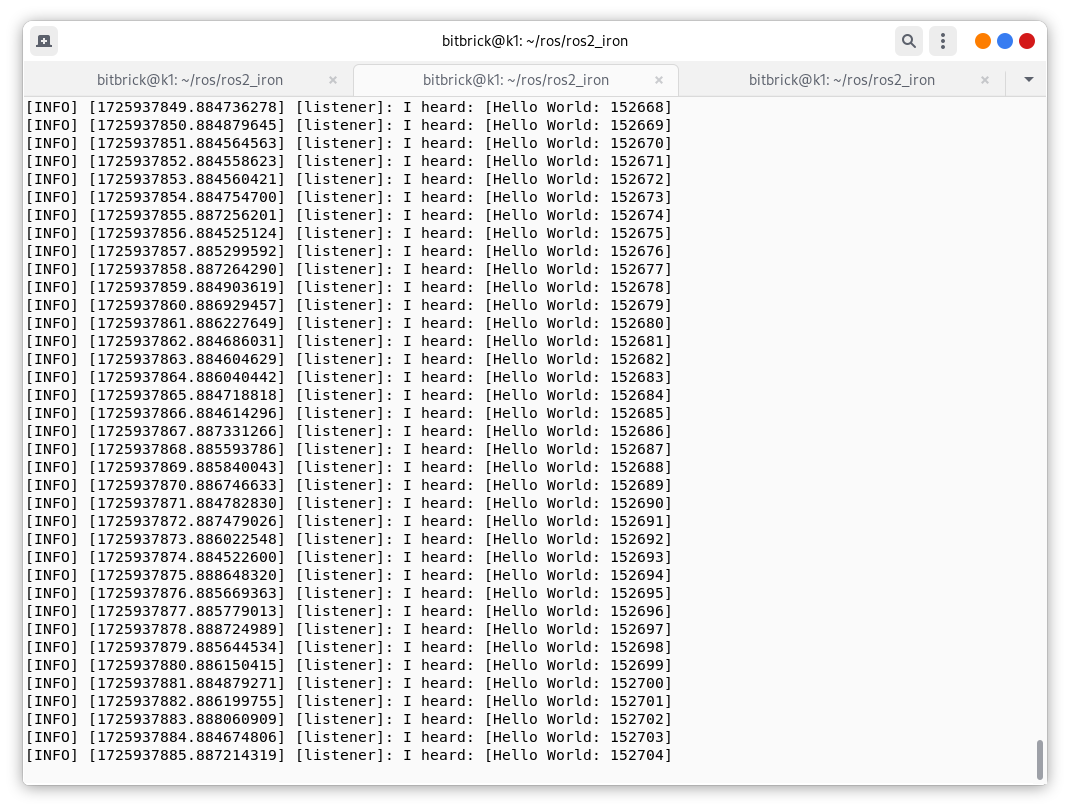
在一个终端中,source setup文件然后运行一个C++ talker:
ros2 run demo_nodes_cpp talker
在另一个终端中source setup文件然后运行一个Python listener:
ros2 run demo_nodes_py listener
你应该看到talker说它正在发布消息,listener说它听到了这些消息。这验证了C++和Python API都在正常工作。nice!

 示例 2:
示例 2:
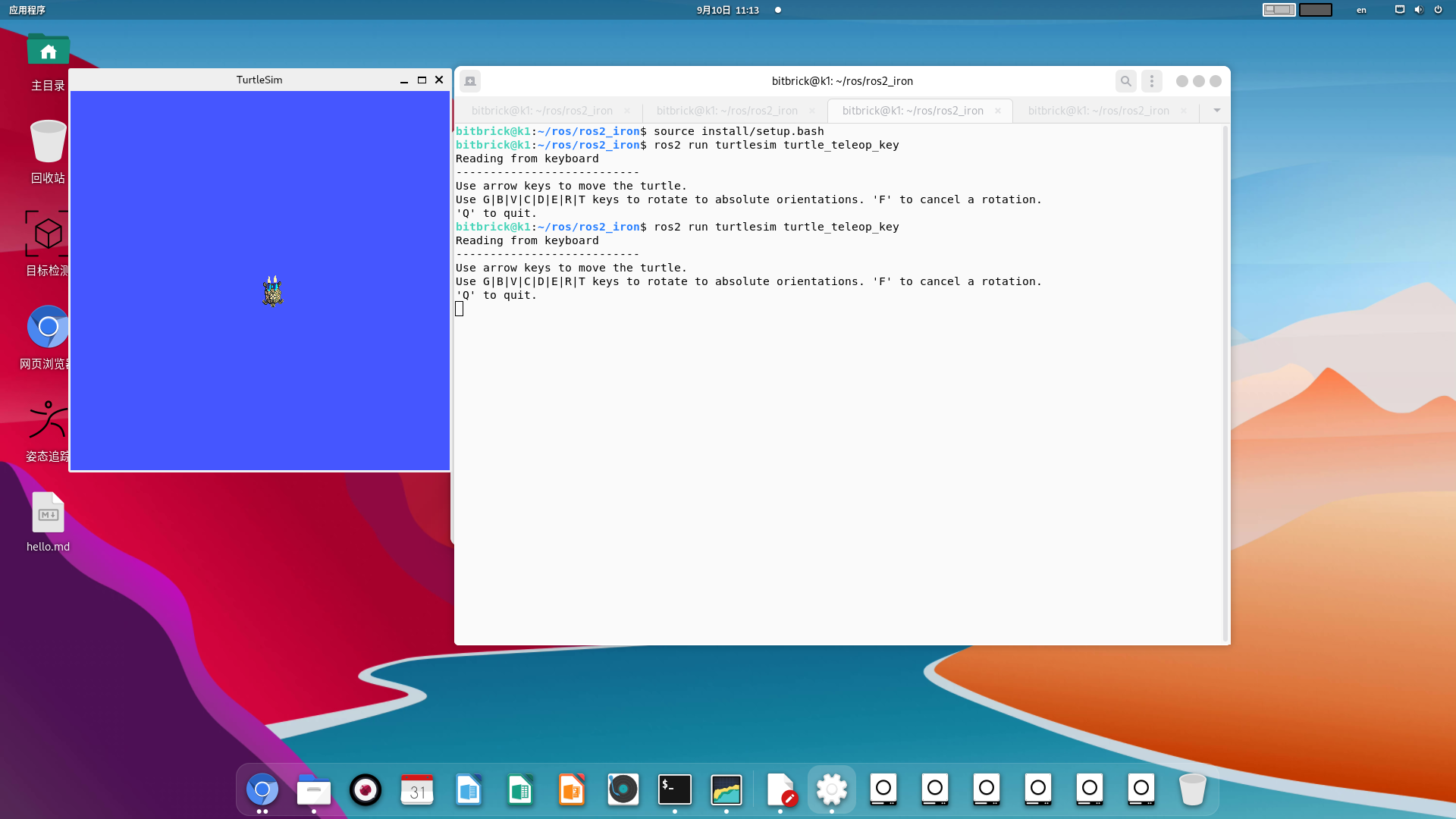
小海龟仿真示例 让我们再次尝试ROS中的经典示例——小海龟仿真器。
分别在两个终端中运行以下指令:
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key