
K1 OH5.0 驱动开发说明
修订记录
| 修订版本 | 修订日期 | 修订说明 |
| 001 | 2025-01-13 | 初始版本 |
1. Sensor 驱动开发
1.1 概述
Sensor 是常见的输入设备,用于感知环境状态并触发相应的响应。相比传统的 Linux 驱动模式,OH 在 HDF(Hardware Driver Foundation)层实现了 Sensor 驱动。
这种方式可实现一次开发、多内核部署,支持轻量系统、小型系统和标准 Linux 系统。同时,HDF 框架对不同驱动进行统一管理,每个驱动都能以服务形式对外提供能力。应用层可通过 HDI(Hardware Device Interface)接口直接访问,无需关注底层实现。
1.2 Sensor 驱动模型
OpenHarmony 中基于 HDF 驱动框架的 Sensor 驱动模型如下:
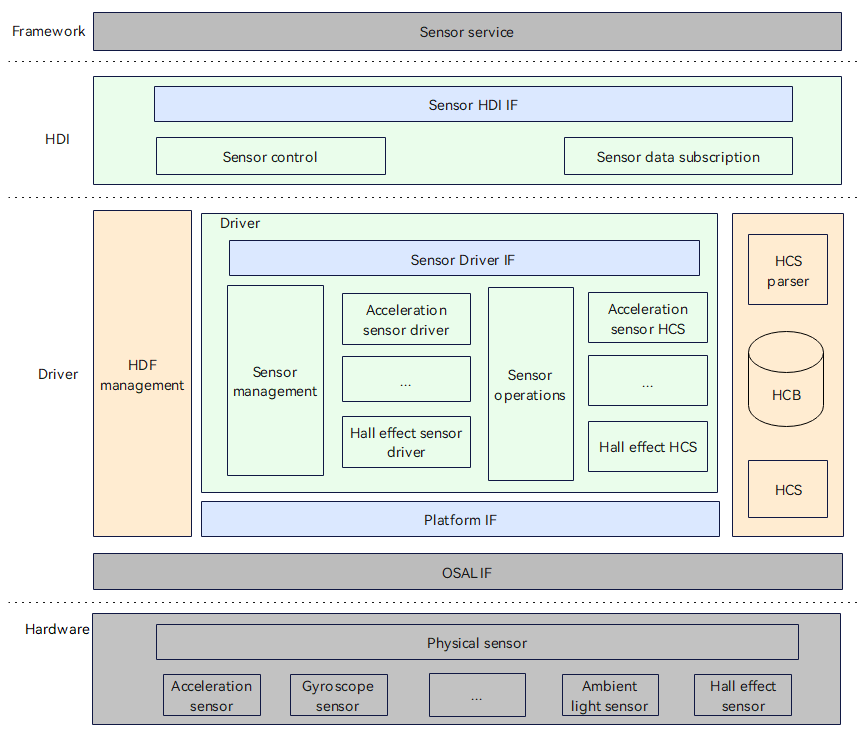
Sensor 驱动模型屏蔽硬件器件差异,为上层 Sensor 服务系统提供稳定的 Sensor 基础能力接口,包括 Sensor 列表查询、Sensor 启停、Sensor 订阅及取消订阅、Sensor 参数配置等功能。
Sensor 驱动开发基于 HDF 框架,并结合操作系统抽象层(OSAL,Operating System Abstraction Layer)和平台驱动接口(如 I2C、SPI、UART 等总线资源),实现跨系统和跨平台的一致性,达到“一次开发,多系统部署”的目标。
OpenHarmony 中 Sensor 驱动模型分为以下层级:
- Hardware:定义 Sensor 设备与 CPU 的连接方式,以及所使用的通信接口(如 I2C、SPI、GPIO 等)。
- Driver:实现硬件外设驱动逻辑,包括
HdfDriverEntry中的bindInit、realese函数,以及数据OpsCall里面的ReadData。 - HDI:定义并实现接口。接口主要包括所有 Sensor 信息查询、Sensor 启停、Sensor 订阅/取消订阅、Sensor 参数配置等稳定的接口,简化服务开发。
- Framework:上层 Sensor 服务。
1.3 HCS 配置
针对不同平台,需要在对应平台目录中修改相应的 .hcs 文件。以下示例展示在 MusePaper 平台下新增 Sensor 模块的配置方法。
1.3.1 配置 device_info.hcs
-
文件路径:
vendor/spacemit/musepaper2/hdf_config/khdf/device_info/device_info.hcs -
配置说明:在
device_info.hcs中添加以下信息。 -
主要字段说明:
policy:服务策略。0:不发布服务1:向内核态发布服务2:向用户态发布服务
- moduleName:与驱动实现的
HdfDriverEntry结构体中的moduleName相同。 - deviceMatchAttr:驱动的私有配置信息。
- serviceName:服务名称,最终会在
/dev/节点下生成serviceName的节点(生成节点的前提条件是policy配置为大于等于1)。
1.3.2 配置 sensor_config.hcs
-
文件路径:
vendor/spacemit/musepaper2/hdf_config/khdf/sensor/sensor_config.hcs -
配置说明:在
sensor_config.hcs中添加如下内容:#include"accel/accel_qm8658_config.hcs"
1.3.3 配置 accel_qm8658_config.hcs
- 文件路径:
vendor/spacemit/musepaper/hdf_config/khdf/sensor/accel/accel_qm8658_config.hcs - 配置说明:新增文件夹
accel,并新建文件accel_qm8658_config.hcs,文件内容如下:
#include"../sensor_common.hcs"
root{
accel_qm8658_chip_config:sensorConfig{
match_attr="hdf_sensor_accel_qm8658_driver";
sensorInfo::sensorDeviceInfo{
sensorName="accelerometer";
vendorName="qmi8658";//maxstringlengthis16bytes
sensorTypeId=1; //enum SensorTypeTag
sensorId=1;//userdefinesensorid
power=230;
}
sensorBusConfig::sensorBusInfo{
busType=0; //0:i2c1:spi
busNum=3;
busAddr=0x6a;
regWidth=1;//1btye
}
sensorIdAttr::sensorIdInfo{
chipName="qm8658";
chipIdRegister=0x00;
chipIdValue=0x05;
}
sensorRegConfig{
/*regAddr:registeraddress
value:configregistervalue
len:sizeofvalue
mask:maskofvalue
delay:configregisterdelaytime(ms)
opsType:enumSensorOpsType0-none1-read2-write3-read_check4-update_bit
calType:enumSensorBitCalType0-none1-set2-revert3-xor4-leftshift5-rightshift
shiftNum:shiftbits
debug:0-nodebug1-debug
save:0-nosave1-save
*/
/*regAddr,value,mask,len,delay,opsType,calType,shiftNum,debug,save*/
initSeqConfig=[
0x02,0x78, 0xff,1,5, 2,0,0,0,0,
0x03,0x26, 0xff,1,5, 2,0,0,0,0,
0x08,0x00,0x03,1,5, 2,0,0,0,0
];
enableSeqConfig=[
0x08,0x01,0x03,1,5, 2,0,0,0,0
];
disableSeqConfig=[
0x08,0x00,0x03,1,5, 2,0,0,0,0
];
}
}
}
1.4 编译选项修改
- 在
drivers/adapter/khdf/linux/model/sensor/Kconfig中添加以下内容:
config DRIVERS_HDF_SENSOR_ACCEL_QM8658
bool "Enable HDF accel qm8658 sensor driver"
default n
depends on DRIVERS_HDF_SENSOR_ACCEL
help
Answer Y to enable HDF accel qm8658 sensor driver.
- 在
drivers/adapter/khdf/linux/model/sensor/Makefile中添加以下内容:
obj-$(CONFIG_DRIVERS_HDF_SENSOR_ACCEL_QM8658)+=$(SENSOR_ROOT_DIR)/chipset/accel/accel_qm8658.o
-
修改 Makefile 对应的驱动实现文件如下:
drivers/framework/model/sensor/driver/chipset/accel/accel_qm8658.cdrivers/framework/model/sensor/driver/chipset/accel/accel_qm8658.h
-
内核 defconfig 配置
在 kernel/linux/spacemit_kernel-6.6/arch/riscv/configs/k1_defconfig 文件中添加以下内容:
CONFIG_DRIVERS_HDF_SENSOR=y
CONFIG_DRIVERS_HDF_SENSOR_ACCEL=y
CONFIG_DRIVERS_HDF_SENSOR_ACCEL_QM8658=y
1.5 应用代码目录说明
Sensor 驱动对外服务的接口实现均在 drivers/peripheral/sensor 路径下,该目录对应的功能说明如下:
/drivers/peripheral/sensor
├── hal
└── include
└── src
├── interfaces
└── include
├── test
└── unit
- hal:sensor 模块 hal 层代码
- include:sensor 模块 hal 层内部头文件
- src:sensor 模块 hal 层代码的实现
- interfaces:sensor 模块对上层服务提供的驱动能力接口
- include:sensor 模块对外提供的接口定义
- test:sensor 模块测试代码
- unit:sensor 模块单元测试代码
1.6 常见问题处理
- 确认 HCS 配置的准确性,包括 I2C 总线、Sensor 寄存器初始化、Sensor 使能等信息。
- 确认是否修改了编译选项,使其正常编译进系统。
- 若应用使能不上,确认模块是否要配置权限,以及是否要
touch hdf.hcs更改时间戳。
2. TouchScreen 驱动开发
2.1 概述
TouchScreen 是常见的输入设备,用于感知用户在屏幕上的触摸操作并作出相应响应。
相比传统的 Linux 驱动模式,OpenHarmony 在 HDF 层实现了 TouchScreen 驱动,使其具备“一次开发,多系统部署”的能力,可支持轻量级系统、小型系统以及标准 Linux 系统。
在 HDF 框架下,不同驱动可统一管理,并以服务形式对外提供能力。应用层只需通过调用 HDI 接口,即可访问 TouchScreen 驱动服务。
2.2 TouchScreen 驱动模型
OpenHarmony 中基于 HDF 驱动框架的 TouchScreen 驱动模型如下:
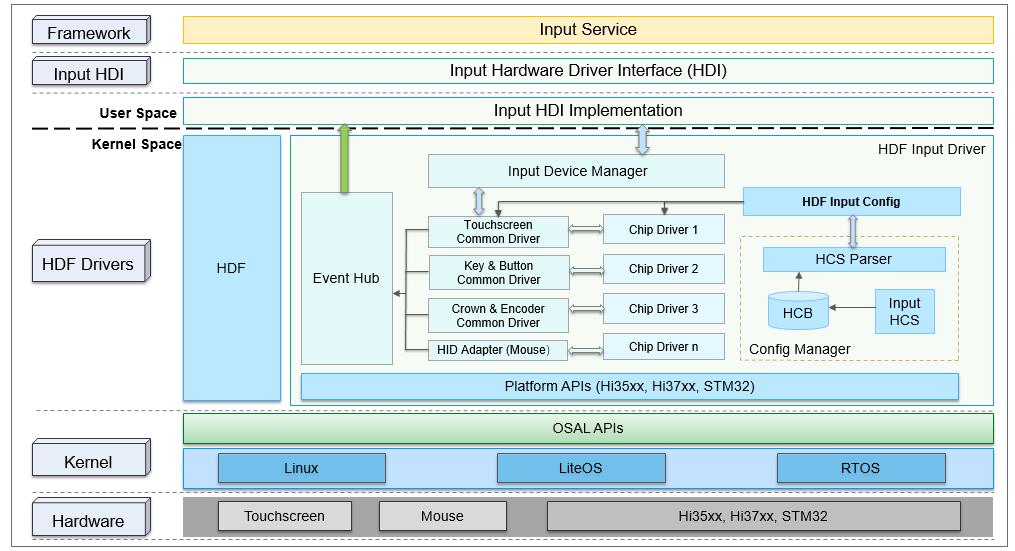
OpenHarmony 中的 TouchScreen 驱动模型分为以下层级:
- Hardware:定义 TouchScreen 设备与 CPU 的连接方式,以及外设的通信接口(如 I2C、SPI、UART 等)和 IO 口配置。
- Kernel:根据项目需求选择合适的内核(Linux / LiteOS / RTOS)。该层通过 OSAL API 统一不同内核的接口,为 HDF Drivers 层提供标准化的操作接口,最大限度的屏蔽了不同内核之间的差异导致上层的修改。
- HDF Drivers:实现硬件驱动逻辑,完成设备初始化与操作。如 TouchScreen 驱动需实现
struct TouchChipOps ops中的函数,如 Init、Detect、Resume、Suspend、DataHandle、UpdateFirmware 等。 - Input HDI:该层实现了 TouchScreen 设备管理、业务控制、数据上报等驱动接口能力,为上层提供硬件驱动服务。
- Framework:上层 TouchScreen 服务。
2.3 HCS 配置
对于不同的平台,需要在对应的平台目录修改对应的 .``hcs 文件,下面示例为 MUSEPaper 平台下新增 GT9271 触摸屏的修改方法。
2.3.1 配置 device_info.hcs
-
文件路径:
vendor/spacemit/musepaper/hdf_config/khdf/device_info/device_info.hcs -
配置说明:在
device_info.hcs中添加以下内容。 -
主要字段说明:
policy:服务策略。0:不发布服务1:向内核态发布服务2:向用户态发布服务
- moduleName:与驱动实现的
HdfDriverEntry结构体中的moduleName相同。 - deviceMatchAttr:驱动的私有配置信息。
- serviceName:服务名称,最终会在
/dev/节点下生成serviceName的节点(生成节点的前提条件是policy配置为大于等于1)。
2.3.2 配置 input_config.hcs
- 文件路径:
vendor/spacemit/musepaper/hdf_config/khdf/input/input_config.hcs - 配置说明:在
input_config.hcs中修改如下配置。
2.3.3 修改配置
在 chipConfig 字段中新增 chip4,表示新增的一个触摸屏驱动。
2.4 编译选项修改
下面以新增触摸屏 GT9271 的驱动为例介绍相关的编译选项修改。
在 drivers/adapter/khdf/linux/model/input/Kconfig 中新增如下内容:
config DRIVERS_HDF_TP_10P10_GT9271
bool "Enable HDF tp10P10 GT9271
3. UART 驱动开发
3.1 概述
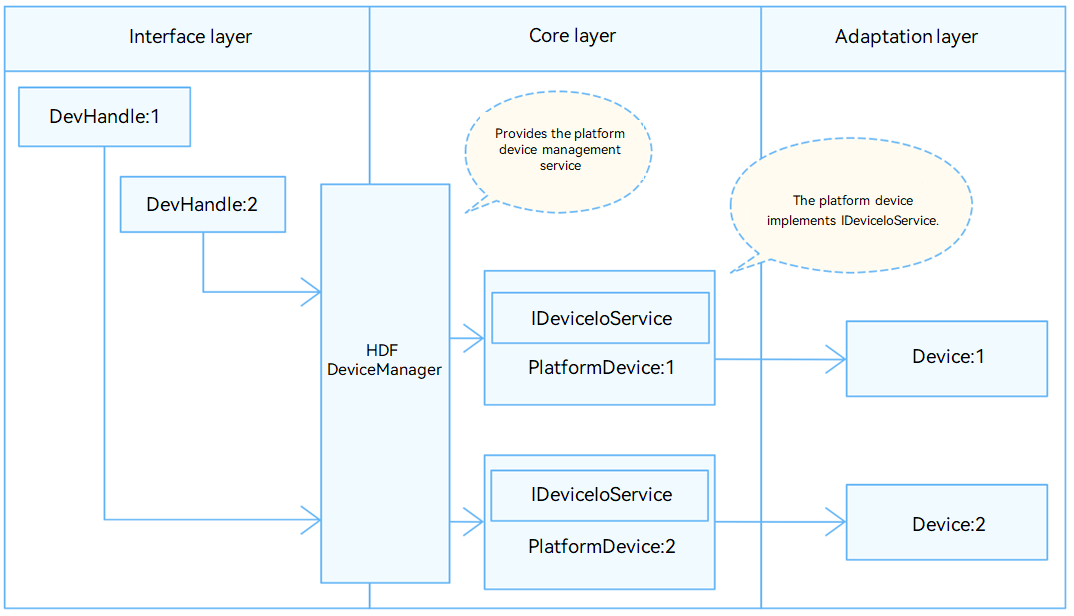
UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)是一种常见的串行通信接口。在 HDF 框架中,UART 的接口适配模式采用独立服务模式。
在此模式下,每个 UART 设备对象会独立发布一个设备服务,用于处理外部访问。设备管理器在接收到 API 请求后,会根据请求参数调用对应设备对象的内部方法。
独立服务模式的优点是可直接借助 HDFDeviceManager 的服务管理能力;缺点是需要为每个设备单独配置设备节点,这会增加内存占用。
UART 独立服务模式结构图如下图所示。
3.2 DTS 配置
配置说明
配置相应的串口设备节点,例如配置串口 2:
&uart2 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_uart2>;
status = "okay";
};
3.3 HCS 配置
对于不同的平台,需要在对应的平台目录修改对应的 .``hcs 文件。
3.3.1 配置 device_info.hcs
文件路径
vendor/spacemit/xxx/hdf_config/khdf/device_info/device_info.hcs
配置说明
在 device_info.hcs 中添加以下内容:
在配置过程中需要注意如下几点:
-
Policy:设置节点隐藏或显示。
- 取值
1表示隐藏,即在dev目录下不显示 HDF 节点; - 取值
2表示显示,即在dev目录下显示 HDF 节点。
- 取值
-
Permission:文件权限。
-
Priority:启动顺序,数值越大启动越晚。
-
serviceName:设备服务名,例如
HDF_PLATFORM_UART_2,其中后缀2对应应用中open函数的port参数。 -
deviceMatchAttr:需与
rk3568_uart_config.hcs中的match_attr取值一致。
3.3.2 **配置 **rk3568_uart_config.hcs
文件路径
vendor/spacemit/xxx/hdf_config/khdf/platform/rk3568_uart_config.hcs
配置说明
在 rk3568_uart_config.hcs 修改如下:
在配置过程中需要注意如下几点:
-
device_uart_0x0002: 后缀
0x0002为串口编号,从0x0000起递增。 -
Num:与
driver_name值ttyS组成驱动设备名,例如ttyS9。 若驱动设备名不以ttyS开头,例如 RK3568A 板的串口 A ~ D 的驱动设备名以ttyXRUSB开头,此时需要额外增加对driver_name的修改。例如:device_uart_0x0002 :: uart_device {
num = 9;
driver_name = "ttyXRUSB"
match_attr = "rockchip_rk3568_uart_9";
}如果不增加对
driver_name的修改,则默认使用 template 中的driver_name值,即ttyS。
3.4 应用使用流程
UART 的 API 接口使用,详见 OHOS 的 API 文档。
常用的 UART API 说明如下:
- uartOpen(port: number):其中,port 为 “配置
device_info.hcs” 章节中serviceName的后缀数字。 - uartSetBaud:设置指定串口的波特率。
- uartSetAttribute:设置指定串口的基本属性。
3.5 常见问题处理
- 确认
/dev/下面是否有tty的设备生成。如果没有生成,请参考 “DTS 配置” 章节检查配置。 - 确认
/dev/下面是否有HDF_PLATFORM_UART_x生成(x为配置的service_name)。如果没有生成,请参考 “HCS 配置” 章节检查配置。
数据读写不生效:
- 将 RX 和 TX 短接,通过两个 hdc 终端去测试,一个执行
cat tty节点,一个执行echo tty节点。如果cat端收不到数据:- 请确认“DTS 配置”章节中的 pinctrl - 0 选择了正确的串口 pin 脚。
- 检查并确保硬件电路正常。
发送正常,读数据丢失:
- 请检查是否有其他应用在抢数据。
- 检查是否存在硬件干扰。