
SPI
芯片名称与内核版本
| 芯片名称 | 内核版本 |
|---|---|
| 采用 Linux 4.4 的所有芯片 | Linux 4.4 |
| 采用 Linux 4.19 及以上内核的所有芯片 | Linux 4.19 及以上内核 |
前言
概述
本文介绍 Linux SPI 驱动原理和基本调试方法。
读者对象
本文档主要适用于以下工程师:
- 技术支持工程师
- 软件开发工程师
1. Rockchip SPI 功能特点
SPI (serial peripheral interface),以下是 linux 4.4 SPI 驱动支持的一些特性︰
- 默认采用摩托罗拉 SPI 协议
- 支持 8 位和 16 位
- 软件可编程时钟频率
- 支持 SPI 4 种传输模式配置
- 每个 SPI 控制器支持一个到两个片选
- 支持 spi slave mode,有且仅有 SPI_CS0N 作为 CS 输入脚:
- 传输过程不允许切换为 GPIO function
- 不支持 CS1N 替代 除以上支持,linux 4.19 新增以下特性:
- 框架支持 slave 和 master 两种模式
1.1 SPI 接口速率
| 芯片名称 | Master Mode 接口最高速率 | Slave Mode 接口最高速率 |
|---|---|---|
| RK3506 | 50MHz | 50MHz |
| RV1106B/RV1103B | 50MHz | 33MHz |
| RK3576 | 50MHz | 33MHz |
| RK3562 | 50MHz | 33MHz |
| RK3528 | 50MHz | 33MHz |
| RV1106/RV1103 | 50MHz | 33MHz |
| RK3588 | 50MHz | 33MHz |
| RV1126/RV1109 | 50MHz | 16MHz |
| RK3568 | 50MHz | 33MHz |
| RK1808 | 50MHz | 16MHz |
| RK3308 | 50MHz | 16MHz |
| 其他芯片平台 | 50MHz | 16MHz |
说明:
- 接口最高速率为理论速率,受设备走线 PCB 质量影响,以实测为准。
- 部分平台由于 PLL 策略原因无法准确分频到上限值,实际以最大分频值为准。
2. 内核软件
2.1 代码路径
drivers/spi/spi.c:SPI 驱动框架drivers/spi/spi-rockchip.c:RK SPI 各接口实现drivers/spi/spi-rockchip-slave.c:RK SPI slave 各接口实现drivers/spi/spidev.c:创建 SPI 设备节点,用户态使用drivers/spi/spi-rockchip-test.c:SPI 测试驱动,需要手动添加到 Makefile 编译Documentation/spi/spidev_test.c:用户态 SPI 测试工具
2.2 SPI 设备配置 —— RK 芯片作 Master 端
内核配置
Device Drivers --->
[*] SPI support --->
<*> Rockchip SPI controller driver
DTS 节点配置
&spi1 {
status = "okay";
// assigned-clocks = <CLK_SPI1>; // 默认不用配置,CLK_SPIn 请从 soc 对应的 dtsi 里确认
// assigned-clock-rates = <200000000>; // 默认不用配置,SPI 设备工作时钟值
// dma-names; // 默认不用配置,关闭 DMA 支持,仅支持 IRQ 传输
// rockchip,poll-only; // 默认不用配置,开启后强制使用 CPU 传输,仅支持 master mode 下配置
// rx-sample-delay-ns = <10>; // 默认不用配置,读采样延时,详细参考 “常见问题”“延时采样时钟配置方案” 章节
// rockchip,autosuspend-delay-ms = <500>; // 默认不用配置,Runtime PM autosuspend 延时,详细参考 “SPI 传输速率及 CPU 负载优化”
// rockchip,rt; // 默认不用配置,将 spi 数据传输进程放到 SCHED_FIFO 类中,其优先级为 50
spi_test@10 {
compatible = "rockchip,spi_test_bus1_cs0"; // 与驱动对应的名字
reg = <0>; // 片选 0 或者 1
spi-cpha; // 设置 CPHA = 1,不配置则为 0
spi-cpol; // 设置 CPOL = 1,不配置则为 0
spi-lsb-first; // IO 先传输 lsb
spi-max-frequency = <24000000>; // spi clk 输出的时钟频率,不超过 50M
status = "okay"; // 使能设备节点
};
};
spiclk assigned-clock-rates 和 spi-max-frequency 的配置说明::
spi-max-frequency是 SPI 的输出时钟,由 SPI 工作时钟spiclk assigned-clock-rates内部分频后输出,由于内部至少 2 分频,所以关系是spiclk assigned-clock-rates >= 2 * spi-max-frequency。- 假定需要 50MHz 的 SPI IO 速率,可以考虑配置(记住内部分频为偶数分频)
spi_clk assigned-clock-rates = <100000000>,spi-max-frequency = <50000000>,即工作时钟 100MHz(PLL 分频到一个不大于 100MHz 但最接近的值),然后内部二分频最终 IO 接近 50MHz。 spiclk assigned-clock-rates不要低于 24M,否则可能有问题。
2.3 SPI 设备配置 —— RK 芯片作 Slave 端
关键补丁
推荐使用 SPI slave 源码 spi-rockchip-slave.c,由于 SDK 版本问题,建议先确认 SDK 是否有以下补丁:
commit 10cbf3c2c93fca6e5ec6c99b5bdb319ca0494d45
Author: Jon Lin <jon.lin@rock-chips.com>
Date: Tue Nov 21 10:58:57 2023 +0800
spi: rockchip-slave: Add code
1. Implement one msg mechanism
2. Support SRAM extension by dts rockchip,sram property
Change-Id: I0fccc5d4347294488b5382ad3ba5ae72b35610f2
Signed-Off-By: Jon Lin <jon.lin@rock-chips.com>
说明:
- 如无该补丁,客户可直��接通过 Redmine -> FAE 项目 -> 文档 -> 开发配置文档 -> SPI 路径获取。
内核配置
Device Drivers --->
[*] SPI support --->
[*] SPI slave protocol handlers
[*] Rockchip SPI Slave controller driver
DTS 节点配置
&spi1 {
compatible = "rockchip,spi-slave"; // 优先使用 SPI slave 专用驱动
status = "okay";
// ready-gpios = <&gpio1 RK_PD2 GPIO_ACTIVE_LOW>; // 建议配置,SPI slave 完成传输配置的信号,详细参考 “内核 SPI Slave 软件” 章节
// rockchip,cs-inactive-disable; // 默认不用配置,当 SPI master 时序 tod_cs(Clk Rise To CS Rise Time) 超过多个 io 时钟周期,应开启配置来屏蔽检测 cs 释放动作
slave { // 按照框架要求,SPI slave 子节点的命名需以 "slave" 开始
compatible = "rockchip,spi_test_bus1_cs0";
reg = <0>; // 片选仅支持 0
spi-cpha; // 设置 CPHA = 1,不配置则为 0
spi-cpol; // 设置 CPOL = 1,不配置则为 0
spi-lsb-first; // IO 先传输 lsb
status = "okay"; // 使能设备节点
};
};
说明:
- RK SPI 默认使能 DMA 传输,slave mode 不建议关闭 DMA 传输。当一笔传输超过控制器缓存数量,软件会配置为 DMA 传输,来避免中断传输相应不及时。
2.4 SPI Slave 须知
2.4.1 建议设置 performance
当 master 速率超过一定频率后,建议传输过程设置 performance 模式,避免传输过程 DRAM 变频导致控制器缓存溢出:
bits_per_word = 8bits,master io 速率超过 5MHzbits_per_word = 16bits,master io 速率超过 10MHz
参考代码:
diff --git a/drivers/spi/spi-rockchip-test.c b/drivers/spi/spi-rockchip-test.c
index 544d6038919a..c1037153ff86 100644
--- a/drivers/spi/spi-rockchip-test.c
+++ b/drivers/spi/spi-rockchip-test.c
@@ -36,6 +36,8 @@
#include <linux/platform_data/spi-rockchip.h>
#include <linux/uaccess.h>
#include <linux/syscalls.h>
+#include <soc/rockchip/rockchip-system-status.h>
+#include <dt-bindings/soc/rockchip-system-status.h>
#define MAX_SPI_DEV_NUM 10
#define SPI_MAX_SPEED_HZ 12000000
@@ -242,8 +244,10 @@ static ssize_t spi_test_write(struct file *file,
}
start_time = ktime_get();
+ rockchip_set_system_status(SYS_STATUS_PERFORMANCE);
for (i = 0; i < times; i++)
spi_read_slt(id, rxbuf, size);
+ rockchip_clear_system_status(SYS_STATUS_PERFORMANCE);
end_time = ktime_get();
cost_time = ktime_sub(end_time, start_time);
us = ktime_to_us(cost_time);
说明:
-
建议所有 slave mode 传输行为都在 performance mode 下运行。
-
set/clear performance 接口有一定的时间开销,所以建议业务上层设置,避免频繁调用。
-
如果缓存溢出,slave 无法完成 DMA 传输,会阻塞无法退出,通过打印 SPI->SPI_RISR 寄存器可以确认是否出现缓存溢出。
2.4.2 建议设置 16bits 宽度
最大限度利用 slave fifo 容量,加速且最小 burst 2,能加速 slave 端的 DMA 传输速率,避免 fifo 因为来不及搬移造成堆叠。
2.4.3 其他须知
SPI Slave 测试须知: SPI 做 slave,要先启动 slave read,再启动 master write,不然会导致 slave 还没读完,master 已经写完了。
slave write,master read 也是需要先启动 slave write,因为只有 master 送出 clk 后,slave 才会工作,同时 master 会立即发送或接收数据。
例如:在第三章节的基础上:
- 先 slave:
echo write 0 1 16 > /dev/spi_misc_test - 再 master:
echo read 0 1 16 > /dev/spi_misc_test
2.5 SPI 设备驱动介绍
设备驱动注册:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/of.h>
#include <linux/spi/spi.h>
static int spi_test_probe(struct spi_device *spi)
{
int ret;
if(!spi)
return -ENOMEM;
spi->bits_per_word= 8;
ret= spi_setup(spi);
if(ret < 0) {
dev_err(&spi->dev,"ERR: fail to setup spi\n");
return-1;
}
return ret;
}
static int spi_test_remove(struct spi_device *spi)
{
printk("%s\n",__func__);
return 0;
}
static const struct of_device_id spi_test_dt_match[]= {
{.compatible = "rockchip,spi_test_bus1_cs0", },
{.compatible = "rockchip,spi_test_bus1_cs1", },
{},
};
MODULE_DEVICE_TABLE(of, spi_test_dt_match);
static struct spi_driver spi_test_driver = {
.driver = {
.name = "spi_test",
.owner = THIS_MODULE,
.of_match_table = of_match_ptr(spi_test_dt_match),
},
.probe = spi_test_probe,
.remove = spi_test_remove,
};
static int __init spi_test_init(void)
{
int ret = 0;
ret = spi_register_driver(&spi_test_driver);
return ret;
}
module_init(spi_test_init);
static void __exit spi_test_exit(void)
{
return spi_unregister_driver(&spi_test_driver);
}
module_exit(spi_test_exit);
对 SPI 读写操作请参考 include/linux/spi/spi.h,以下简单列出几个
static inline int
spi_write(struct spi_device *spi,const void *buf, size_t len)
static inline int
spi_read(struct spi_device *spi,void *buf, size_t len)
static inline int
spi_write_and_read(structspi_device *spi, const void *tx_buf, void *rx_buf,
size_t len)
2.6 User mode SPI device 配置
User mode SPI device 指的是用户空间直接操作 SPI 接口,这样方便众多的 SPI 外设驱动跑在用户空间,不需要改到内核,方便驱动移植开发。
内核配置
Device Drivers --->
[*] SPI support --->
[*] User mode SPI device driver support
DTS 配置
&spi0 {
status = "okay";
max-freq = <50000000>;
spi_test@0 {
compatible = "rockchip,spidev";
reg = <0>;
spi-max-frequency = <5000000>;
};
};
使用说明:
- 驱动设备加载注册成功后,会出现类似这个名字的设备:
/dev/spidev1.1。 - 设备节点的读写操作例程请参照:
- 内核 4.4
Documentation/spi/spidev_test.c - 内核 4.19 及以后
tools/spi/spidev_test.c
- 内核 4.4
- 可在内核工程编译后,进入对应路径,输入以下命令直接编译标准 SPI app 程序:
make CROSS_COMPILE=~/path-to-toolchain/gcc-xxxxx-toolchain/bin/xxxx-linux-gnu-
支持配置为 SPI slave 设备,参考 “SPI 设备配置 —— RK 芯片做 Slave 端”,其中 DTS 配置 sub node 应保持为 "rockchip,spidev"。
2.7 cs-gpios 支持
用户可以通过 spi-bus 的 cs-gpios 属性来实现 gpio 模拟 cs 以扩展 SPI 片选信号,cs-gpios 属性详细信息可以查阅内核文档 Documentation/devicetree/bindings/spi/spi-bus.txt。
2.7.1 Linux 4.4 配置
该支持需要较多支持补丁,请联系 RK 工程师获取相应的补丁。
2.7.2 Linux 4.19 及以上内核配置
以 SPI1 设定 GPIO0_C4 为 spi1_cs2n 扩展脚为例。
设置 cs-gpio 脚并在 SPI 节点中引用:
diff --git a/arch/arm/boot/dts/rv1126-evb-v10.dtsi b/arch/arm/boot/dts/rv1126-
evb-v10.dtsi
index 144e9edf1831..c17ac362289e 100644
--- a/arch/arm/boot/dts/rv1126-evb-v10.dtsi
+++ b/arch/arm/boot/dts/rv1126-evb-v10.dtsi
&pinctrl {
...
+
+ spi1 {
+ spi1_cs0n: spi1-cs1n {
+ rockchip,pins =
+ <0 RK_PC2 RK_FUNC_GPIO
&pcfg_pull_up_drv_level_0>;
+ };
+ spi1_cs1n: spi1-cs1n {
+ rockchip,pins =
+ <0 RK_PC3 RK_FUNC_GPIO
&pcfg_pull_up_drv_level_0>;
+ };
+ spi1_cs2n: spi1-cs2n {
+ rockchip,pins =
+ <0 RK_PC4 RK_FUNC_GPIO
&pcfg_pull_up_drv_level_0>;
+ };
+ };
};
diff --git a/arch/arm/boot/dts/rv1126.dtsi b/arch/arm/boot/dts/rv1126.dtsi
index 351bc668ea42..986a85f13832 100644
--- a/arch/arm/boot/dts/rv1126.dtsi
+++ b/arch/arm/boot/dts/rv1126.dtsi
spi1: spi@ff5b0000 {
compatible = "rockchip,rv1126-spi", "rockchip,rk3066-spi";
reg = <0xff5b0000 0x1000>;
interrupts = <GIC_SPI 11 IRQ_TYPE_LEVEL_HIGH>;
#address-cells = <1>;
#size-cells = <0>;
clocks = <&cru CLK_SPI1>, <&cru PCLK_SPI1>;
clock-names = "spiclk", "apb_pclk";
dmas = <&dmac 3>, <&dmac 2>;
dma-names = "tx", "rx";
pinctrl-names = "default", "high_speed";
- pinctrl-0 = <&spi1m0_clk &spi1m0_cs0n &spi1m0_cs1n &spi1m0_miso
&spi1m0_mosi>;
- pinctrl-1 = <&spi1m0_clk_hs &spi1m0_cs0n &spi1m0_cs1n &spi1m0_miso_hs
&spi1m0_mosi_hs>;
+ pinctrl-0 = <&spi1m0_clk &spi1_cs0n &spi1_cs1n &spi1_cs2n &spi1m0_miso
&spi1m0_mosi>;
+ pinctrl-1 = <&spi1m0_clk_hs &spi1_cs0n &spi1_cs1n &spi1_cs2n
&spi1m0_miso_hs &spi1m0_mosi_hs>
status = "disabled";
};
SPI 节点重新指定 cs 脚:
+ status = "okay";
+ max-freq = <48000000>;
+ cs-gpios = <&gpio0 RK_PC2 GPIO_ACTIVE_LOW>, <&gpio0 RK_PC3
GPIO_ACTIVE_LOW>, <&gpio0 RK_PC4 GPIO_ACTIVE_LOW>;
spi_test@0 {
compatible = "rockchip,spi_test_bus1_cs0";
...
+ spi_test@2 {
+ compatible = "rockchip,spi_test_bus1_cs2";
+ id = <2>;
+ reg = <0x2>;
+ spi-cpha;
+ spi-cpol;
+ spi-lsb-first;
+ spi-max-frequency = <16000000>;
+ };
};
注释:
- 如果要扩展
cs-gpio,则所有 cs 都要转为 gpio function,用cs-gpios扩展来支持。
3. 内核测试软件
3.1 代码路径
drivers/spi/spi-rockchip-test.c
3.2 SPI 测试设备配置
内核补丁
需要手动添加编译:
drivers/spi/Makefile
+obj-y += spi-rockchip-test.o
DTS 配置
&spi0 {
status = "okay";
spi_test@0 {
compatible = "rockchip,spi_test_bus0_cs0";
id = <0>; //这个属性spi-rockchiptest.c用来区分不同的spi从设备的
reg = <0>; //chip select 0:cs0
1:cs1
spi-max-frequency = <24000000>; //spi output clock
};
spi_test@1 {
compatible = "rockchip,spi_test_bus0_cs1";
id = <1>;
reg = <1>;
spi-max-frequency = <24000000>;
};
};
驱动 log
[ 0.457137] rockchip_spi_test_probe:name=spi_test_bus0_cs0,bus_num=0,cs=0,mode=11,speed=16000000
[ 0.457308] rockchip_spi_test_probe:name=spi_test_bus0_cs1,bus_num=0,cs=1,mode=11,speed=16000000
3.3 测试命令
echo write 0 10 255 > /dev/spi_misc_test
echo write 0 10 255 init.rc > /dev/spi_misc_test
echo read 0 10 255 > /dev/spi_misc_test
echo loop 0 10 255 > /dev/spi_misc_test
echo setspeed 0 1000000 > /dev/spi_misc_test
echo 类型 id 循环次数 传输长度 > /dev/spi_misc_test
echo setspeed id 频率(单位 Hz) > /dev/spi_misc_test
如果需要,可以自己修改测试 case。
4. 内核 SPI Slave 软件
4.1 简介
背景:
- SPI 主从之间传输通常遵循特定协议,如 SPI Nor 兼容 JEDEC SDFP 协议,RK SPI slave 作为设备端传输也应遵循特定的协议,由于协议无范式,所以 RK 提供自定义的传输协议和设备驱动以供客户参考。
- Linux SPI slave 驱动框架限制:
- 使用传输队列,虽然队列唤醒后的线程优先级较高,但受调度影响不能完全保证实时性。
- RK SPI slave mode 限制:
- 每次传输需重新发起 SPI 控制器配置,因此为确保 SPI master 能够获知 RK SPI slave 完成传输配置从而发起数据传输,RK SPI slave 端需增加 side-band 信号做 ready 状态位。
传输协议:
-
RK SPI slave 传输协议:
- RK SPI slave 传输要求指定
ready-gpios来通知 SPI master,基本流程:- slave 主动发起
spi_sync - slave ready,使能 GPIO_SLV_READY 信号
- master 确认 slave ready 后发起传输
- slave 接收来自 master 发出的足够的 clk 后完成传输
- slave idle,释放 GPIO_SLV_READY 信号
- slave 主动发起

- 定义两种包类型:
- ctrl packet:2B cmd,2B addr(RK slave 定义的 application buffer 偏移地址),4B data(通常用于指定之后 data 包的传输长度)
- data packet
- 定义两种传输类型:
- ctrl 传输,仅包含 1 ctrl packet
- data 传输,包含 1 ctrl packet 和 1 data packet 的两�笔 SPI 传输
spidev_rkslv支持SPI_OBJ_APP_RAM_SIZE长度的 application buffer 用于缓存传输数据,SPI master 发起的 data 传输 1 ctrl packet 2B addr 指向该缓存偏移地址。
- RK SPI slave 传输要求指定
设备驱动:
关键补丁
commit d2fef34977c1a7aab3837d29ac8dc3b5378a2754 (HEAD -> develop-4.19)
Author: Jon Lin <jon.lin@rock-chips.com>
Date: Wed Dec 20 12:02:14 2023 +0800
spi: spidev_rkslv: Support dynamic adjustment of system performance
If the DRAM frequency conversion jitters during the transmission process,
it will cause the DMA to be unable to transport SPI FIFO data in a timely
manner, resulting in FIFO overflow/underflow.
Clear performance status for short cmd packet and Set the performance
status for data packet.
Change-Id: I65532ba309677a8d98c8277875a3bd358ca44e44
Signed-off-by: Jon Lin <jon.lin@rock-chips.com>
说明:
- 由于 SDK 版本问题,建议先确认 SDK 是否有以下补丁,如无该补丁,客户可直接通过 Redmine -> FAE 项目 -> 文档 -> 开发配置文档 -> SPI 路径获取。
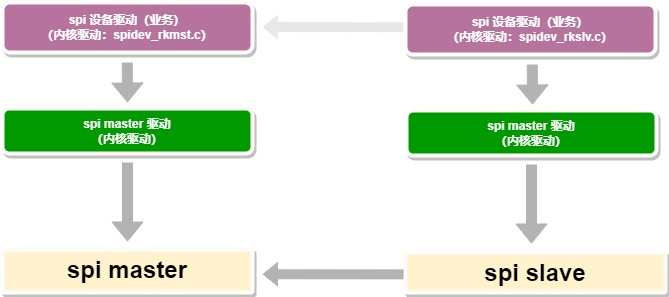
驱动源码:
drivers/spi/spidev-rkslv.c:drivers/spi/spidev-rkmst.c:
源码简介:
drivers/spi/spidev-rkslv.c:
static int spidev_rkslv_ctrl_receiver_thread(void *p) //建立线
程,线程内重复发起传输
{
while (1)
spidev_rkslv_xfer(spidev);
}
static int spidev_rkslv_xfer(struct spidev_rkslv_data *spidev) //传输入口
{
spidev_slv_read(spidev, spidev->ctrlbuf, SPI_OBJ_CTRL_MSG_SIZE); //1 ctrl
packet,获取并解析传输类型
switch (ctrl->cmd) { //1 data
packet,根据传输类型,定义 data packet 并完成收发
case SPI_OBJ_CTRL_CMD_INIT:
/* to-do */
case SPI_OBJ_CTRL_CMD_READ:
/* to-do */
case SPI_OBJ_CTRL_CMD_WRITE:
/* to-do */
case SPI_OBJ_CTRL_CMD_DUPLEX:
/* to-do */
}
}
static const struct file_operations spidev_rkslv_misc_fops = {} //注册 misc device 测试接口
drivers/spi/spidev-rkmst.c:
static int spidev_rkmst_xfer(struct spidev_rkmst_data *spidev, void *tx, void
*rx, u16 addr, u32 len) //传输入口
{
spidev_rkmst_ctrl(spidev, cmd, addr, len); //1 ctrl
packet,定义传输类型
switch (cmd) { //1 data
packet,根据传输类型,定义 data packet 并完成收发
case SPI_OBJ_CTRL_CMD_READ:
/* to-do */
case SPI_OBJ_CTRL_CMD_WRITE:
/* to-do */
case SPI_OBJ_CTRL_CMD_DUPLEX:
/* to-do */
}
}
static const struct file_operations spidev_rkmst_misc_fops = {} //注册 misc device 测试接口
实现业务:
- 提供 “内核 SPI slave 软件” 的目的在于提供协议和设备驱动的参考,最终客户还应在 slave 端的 application buffer 上定义自己的产品需求以实现业务。
4.2 SPI Slave 测试设备配置
defconfig 配置
CONFIG_SPI_SLAVE_ROCKCHIP_OBJ=y
RK SPI slave 端 dts 参考配置
&spi1 {
compatible = "rockchip,spi-slave";
status = "okay";
rockchip,cs-inactive-disable; // RK 内部互联使用 RK Linux SPI master 驱动,tod_cs 较长
ready-gpios = <&gpio1 RK_PD3 GPIO_ACTIVE_LOW>; // 请设置为实际所用 GPIO
slave {
compatible = "rockchip,spi-obj-slave";
reg = <0x0>;
spi-cpha;
spi-cpol;
spi-lsb-first;
spi-max-frequency = <50000000>;
};
};
RK SPI master 端 dts 参考配置
&spi0 {
status = "okay";
spi_test@00 {
compatible = "rockchip,spi-obj-master";
reg = <0x0>;
spi-cpha;
spi-cpol;
spi-lsb-first;
spi-max-frequency = <16000000>;
ready-gpios = <&gpio1 RK_PD2 GPIO_ACTIVE_LOW>; // 请设置为实际所用 GPIO
};
};
4.3 测试命令
SPI master 发起单包数据传输测试
echo cmd addr length > /dev/spidev_rkmst_misc
说明:
cmd:支持read/write/duplexaddr:为对端 slave application buffer 偏移,单位 Bytes,仅支持 10 进制输入length:为 data packet 长度,单位 Bytes,仅支持 10 进制输入
例如:
echo write 128 128 > /dev/spidev_rkmst_misc
echo read 128 128 > /dev/spidev_rkmst_misc
echo duplex 128 128 > /dev/spidev_rkmst_misc
SPI master 发起自动化测试
echo autotest length loops compare > /dev/spidev_rkmst_misc
说明:
autotest:固定输入,先测试全双工数据传输,再测试读写数据传输,并输出速率结果- 测试默认使用对端 slave application buffer 偏移地址 0
length:为 data packet 长度,单位 Bytes,仅支持 10 进制输入loops:设定压测循环次数compare:1 - 开启数据校验;0 - 关闭数据校验(支持特定场景,如持续输出数据进行信号测试)
例如:
echo autotest 1024 64 1 > /dev/spidev_rkmst_misc
SPI slave 测试
echo appmem 0 256 > ./dev/spidev_rkslv_misc # 打印 application buffer 数据
echo verbose 1 > ./dev/spidev_rkslv_misc # 开启传输传输过程 debug log,echo verbose 0 关闭打印
5. 常见问题
5.1 SPI 无信号
- 调�试前确认驱动有跑起来
- 确保 SPI 4 个引脚的 IOMUX 配置无误
- 确认 TX 送时,TX 引脚有正常的波形,CLK 有正常的 CLOCK 信号,CS 信号有拉低
- 如果 clk 频率较高,可以考虑提高驱动强度来改善信号
- 如何简单判断 SPI DMA 是否使能,串口打印如无以下关键字则 DMA 使能成功:
[ 0.457137] Failed to request TX DMA channel
[ 0.457237] Failed to request RX DMA channel
5.2 如何编写 SPI 应用代码
- 请选择合适的目标函数接口再编写驱动。
自定义 SPI 设备驱动
- 参考:“SPI 设备驱动介绍” 编写,实例如:
drivers/spi/spi-rockchip-test.c。
基于 spidev 标准设备节点编写的应⽤程序
- 参考:“User mode SPI device 配置” 章节。
5.3 延时采样时钟配置方案
对于 SPI io 速率较高的情形,正常 SPI mode 可能依旧无法匹配外接器件输出延时,RK SPI master read 可能无法采到有效数据,需要启用 SPI rsd 逻辑来延迟采样时钟。
RK SPI rsd(read sample delay)控制逻辑特性
- 可配值为 0,1,2,3
- 延时单位为 1 spi_clk cycle,即控制器工作时钟,详见 “SPI 设备配置章节”
rx-sample-delay实际延时为 dts 设定值最接近的 rsd 有效值为准,以 spi_clk 200MHz,周期 5ns 为例:- rsd 实际可配延迟为 0,5ns,10ns,15ns
rx-sample-delay设定 12ns,接近有效值 10ns,所以最终为 10ns 延时。
5.4 SPI 传输方式说明
默认传输模式
- Master mode 支持 IRQ、DMA 和 CPU 传输,Slave mode 支持 IRQ 和 DMA 传输,默认都为 IRQ/DMA 组合传输方式:
- 当传输长度 < fifo 深度时,使用 IRQ 传输,默认使用 4.19 及以上内核版本的 SOC,fifo 深度为 64
- 当传输长度 >= fifo 深度时,使用 DMA 传输
修改传输模式
- Master mode 支持:
- 默认 IRQ/DMA 组合传输方式
- 参考 “关闭 DMA 支持,仅支持 IRQ 传输” 说明,关闭 DMA,配置后仅支持 IRQ 传输
- 参考 “rockchip,poll-only” 说明,配置后仅支持 CPU 传输
- Slave mode 不支持修改传输模式。
IRQ 传输特性
- 当数据 < fifo 深度时,一次传触发 1 个中断
- 当数据 >= fifo 深度且使用 IRQ 传输时,fifo 水线设置为半 fifo,通常为 32 item��,一次传输大致上触发 items / 32 次中断
DMA 传输特性
- 不触发 spi 控制器中断,使用 DMA 传输 finished call back 回调
5.5 SPI 传输速率及 CPU 占用率高优化方向
通常 SPI 传输速率慢、IO 高负载下 CPU 占用率高的原因是因为:SPI 传输粒度小,且传输次数多,频繁发起传输从而涉及较多的调度,例如:
- SPI 线程调度
- 中断调度,参考 “SPI 传输方式说明” 章节先确认是否使用到中断传输
- CPU idle 调度
建议优化方向
- 开启 auto runtime,延时设置为 500ms,具体值以实测为准,修改点为 dts 节点添加
rockchip,autosuspend-delay-ms属性 - 降低 CPU 负载:改用 IRQ 传输,相对 DMA 可能会有优势,补丁参考 “改为 IRQ 传输” 小节
- 降低 CPU 负载:如为 DMA 传输,可修改 TX DMA 水线来降低 CPU 在 DMA 回调函数中等待 fifo 传输完成的时间,补丁参考 “修改 SPI 水线”
修改补丁参考
改为 IRQ 传输
diff --git a/arch/arm/boot/dts/rv1126-evb-v10.dtsi b/arch/arm/boot/dts/rv1126-evb-v10.dtsi
index 86dd23482d97..2cea93d2423f 100644
--- a/arch/arm/boot/dts/rv1126-evb-v10.dtsi
+++ b/arch/arm/boot/dts/rv1126-evb-v10.dtsi
@@ -1367,6 +1367,7 @@
status = "okay";
max-freq = <48000000>;
cs-gpios = <0>, <0>, <&gpio0 RK_PC4 GPIO_ACTIVE_LOW>;
+ dma-names;
spi_test@00 {
修改 SPI 水线
diff --git a/drivers/spi/spi-rockchip.c b/drivers/spi/spi-rockchip.c
index 27fd6f671b12..bd0fa8c5f8c3 100644
--- a/drivers/spi/spi-rockchip.c
+++ b/drivers/spi/spi-rockchip.c
@@ -616,7 +616,8 @@ static void rockchip_spi_config(struct rockchip_spi *rs,
else
writel_relaxed(rs->fifo_len / 2 - 1, rs->regs + ROCKCHIP_SPI_RXFTLR);
- writel_relaxed(rs->fifo_len / 2 - 1, rs->regs + ROCKCHIP_SPI_DMATDLR);
+ // writel_relaxed(rs->fifo_len / 2 - 1, rs->regs + ROCKCHIP_SPI_DMATDLR);
+ writel_relaxed(11, rs->regs + ROCKCHIP_SPI_DMATDLR);
writel_relaxed(rockchip_spi_calc_burst_size(xfer->len / rs->n_bytes) - 1,
rs->regs + ROCKCHIP_SPI_DMARDLR);
writel_relaxed(dmacr, rs->regs + ROCKCHIP_SPI_DMACR);