
OpenClaw 配置飞书通道
参考:https://docs.openclaw.ai/zh-CN/channels/feishu
OpenClaw飞书通道允许您通过飞书与OpenClaw进行自然语言交互。配置完成后,您可以在飞书中向OpenClaw发送消息,OpenClaw会理解您的意图并执行相应的操作。
配置步骤
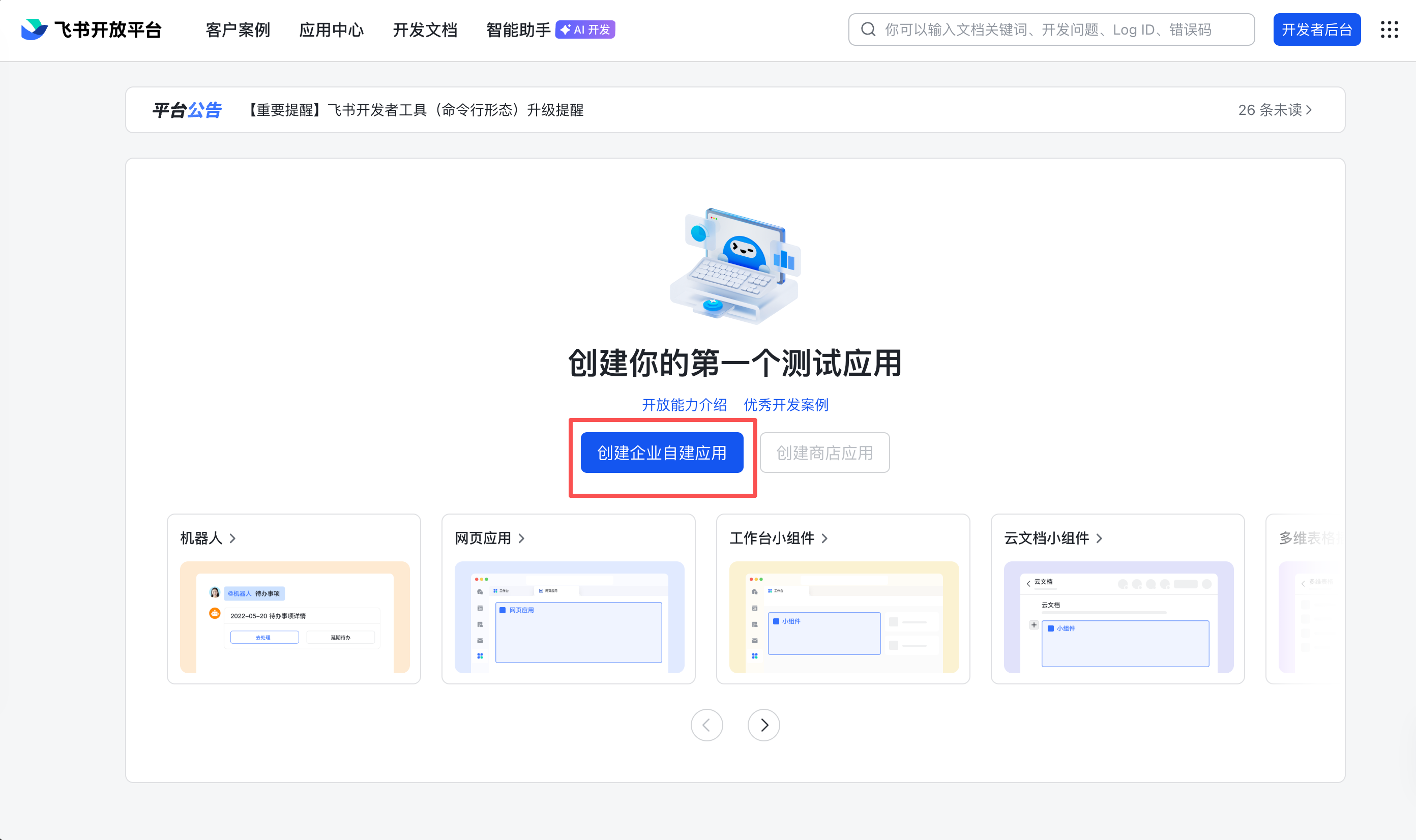
1. 创建飞书应用
2. 添加机器人和权限
添加机器人:选择 添加应用能力 → 按能力添加 → 机器人 → 添加

配置权限:在权限管理页面,选择 批量导入/导出权限 → 导入权限,复制以下权限列表到文本框中,然后点击 导入权限

{
"scopes": {
"tenant": [
"aily:file:read",
"aily:file:write",
"application:application.app_message_stats.overview:readonly",
"application:application:self_manage",
"application:bot.menu:write",
"cardkit:card:write",
"contact:user.employee_id:readonly",
"corehr:file:download",
"docs:document.content:read",
"event:ip_list",
"im:chat",
"im:chat.access_event.bot_p2p_chat:read",
"im:chat.members:bot_access",
"im:message",
"im:message.group_at_msg:readonly",
"im:message.group_msg",
"im:message.p2p_msg:readonly",
"im:message:readonly",
"im:message:send_as_bot",
"im:resource",
"sheets:spreadsheet",
"wiki:wiki:readonly"
],
"user": ["aily:file:read", "aily:file:write", "im:chat.access_event.bot_p2p_chat:read"]
}
}
3. 创建初始版本并发布
创建并发布一个初始版本(具体内容可以随意填写),这样才能进行后续的事件订阅配置。

4. 配置OpenClaw飞书通道
- 进入飞书机器人的 凭证与基础信息 页面,复制 应用凭证 信息

- 运行OpenClaw配置命令并按以下步骤操作:
openclaw configure
- 选择 本地(Local)
- 选择 Channels
- 选择 Configure/link
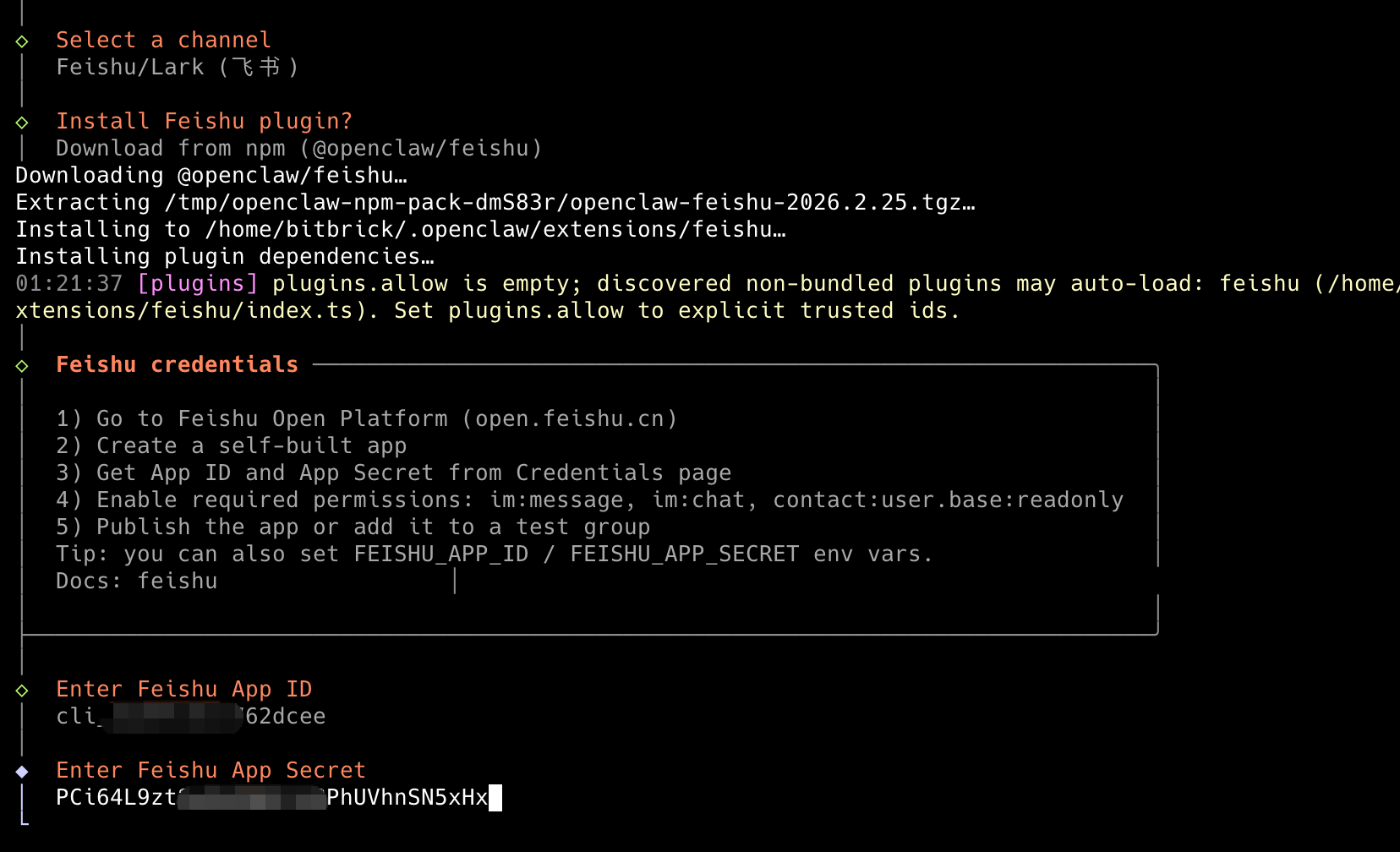
- 选择 Feishu/Lark(飞书)
- 选择 Download from npm 进行npm安装
- 输入飞书应用的 App ID 和 App Secret
- 按如下选择继续配置:
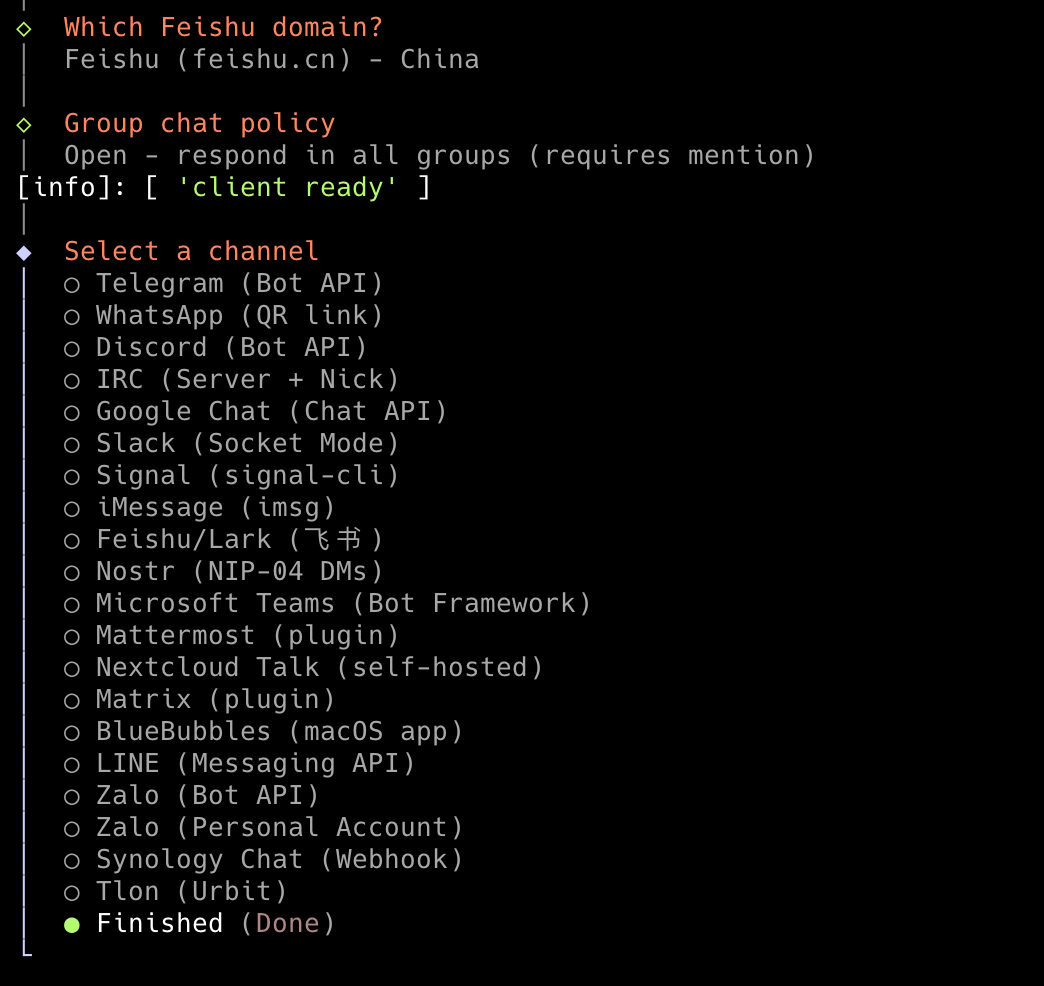
- 选择 Feishu(feishu.cn)- China(中国站点)
- 选择 Open - 在所有群组中响应(需要@机器人)
- 选择 Finished(完成通道选择)
- 选择 Yes 配置DM访问策略
- 选择 Pairing(推荐)
- 选择 Continue(完成)
5. 配置事件订阅
在飞书后台的 事件订阅 页面进行以下配置:
- 选择 使用长连接接收事件(WebSocket模式)
- 添加事件:im.message.receive_v1(用于接收消息)
注意:如果网关未启动或通道未添加,长连接设置将保存失败。

6. 发布新版本
在飞书后台的 版本管理与发布 页面:
- 选择 创建版本
- 填写 版本号 和 说明
- 点击 保存,然后 确认发布

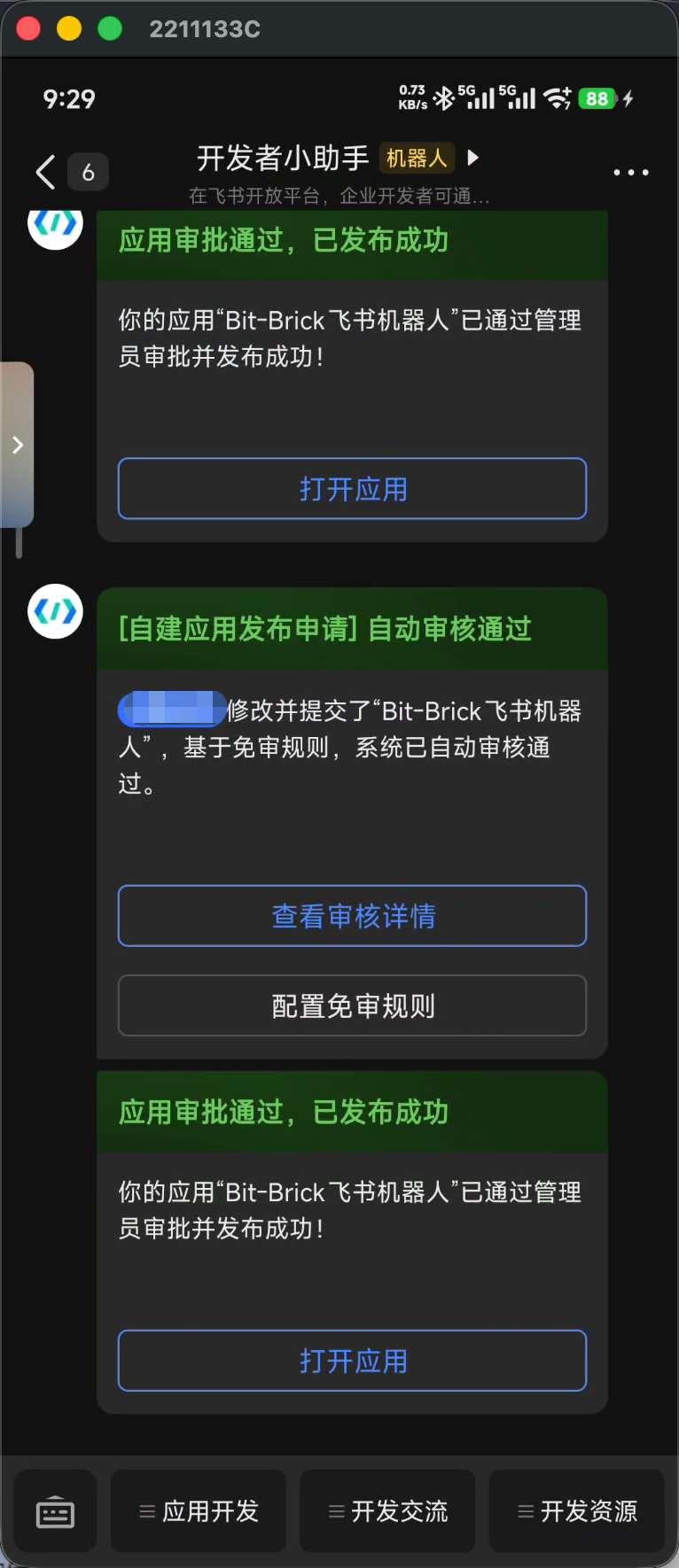
您将在飞书界面收到应用更新提醒,点击 打开应用 进入聊天界面。
7. 配对和验证
- 打开聊天界面,发送任意消息,机器人会回复一个配对码
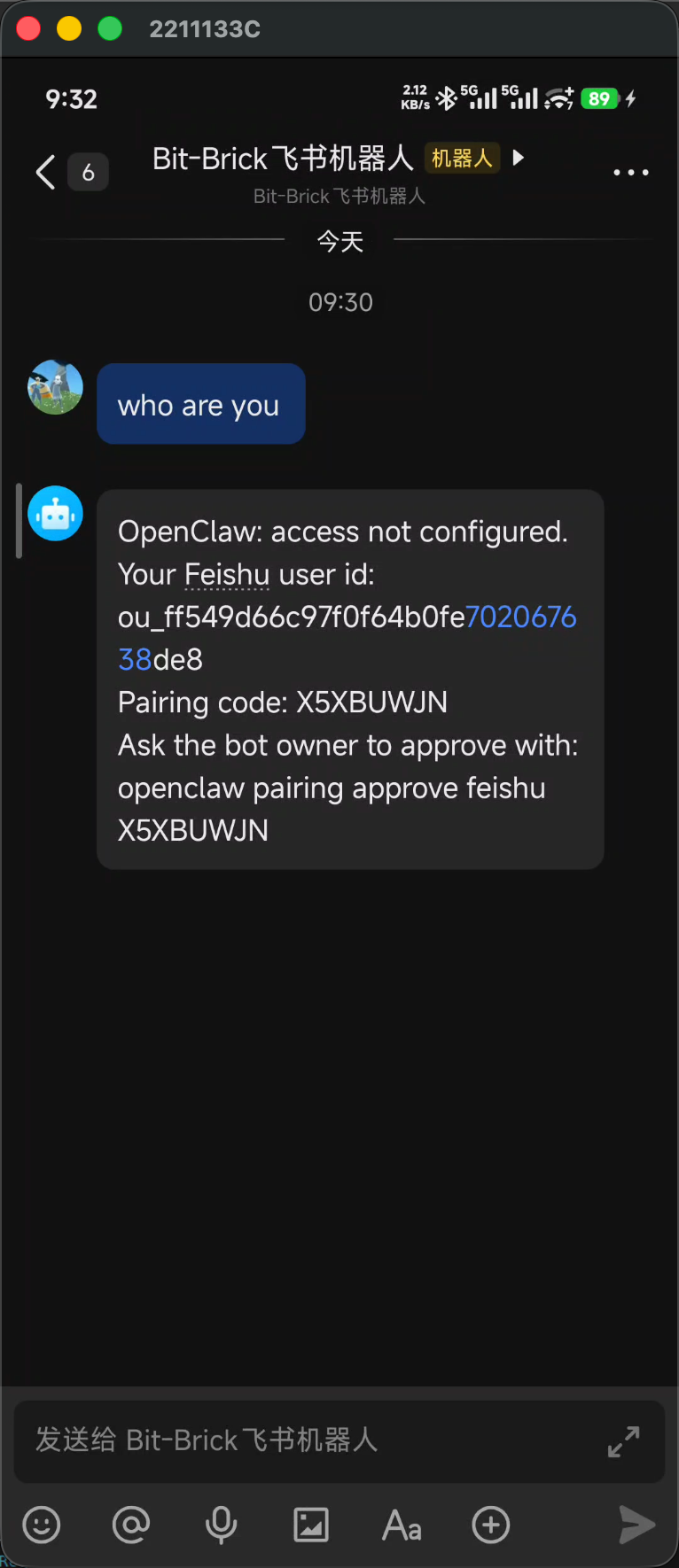
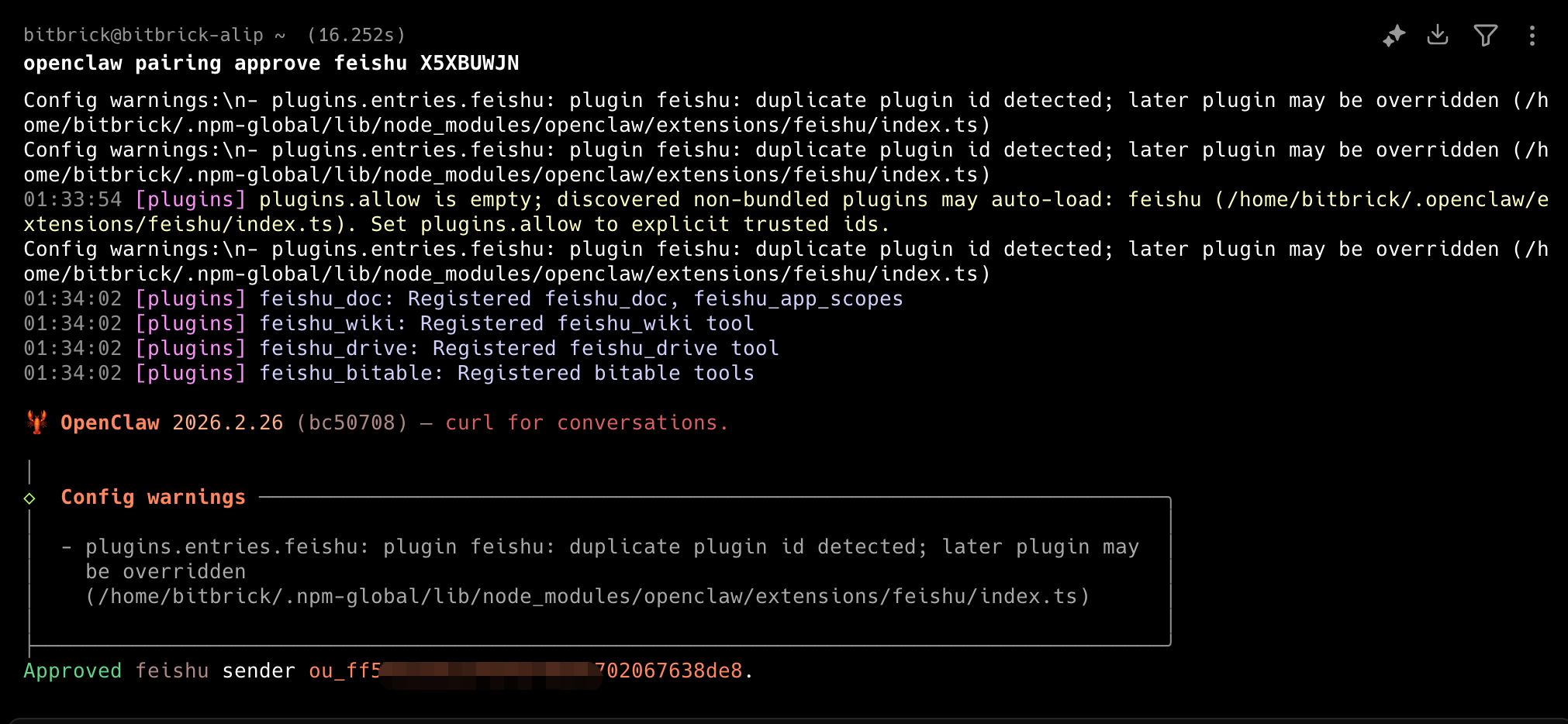
- 在命令行运行OpenClaw配对命令,输入收到的配对码
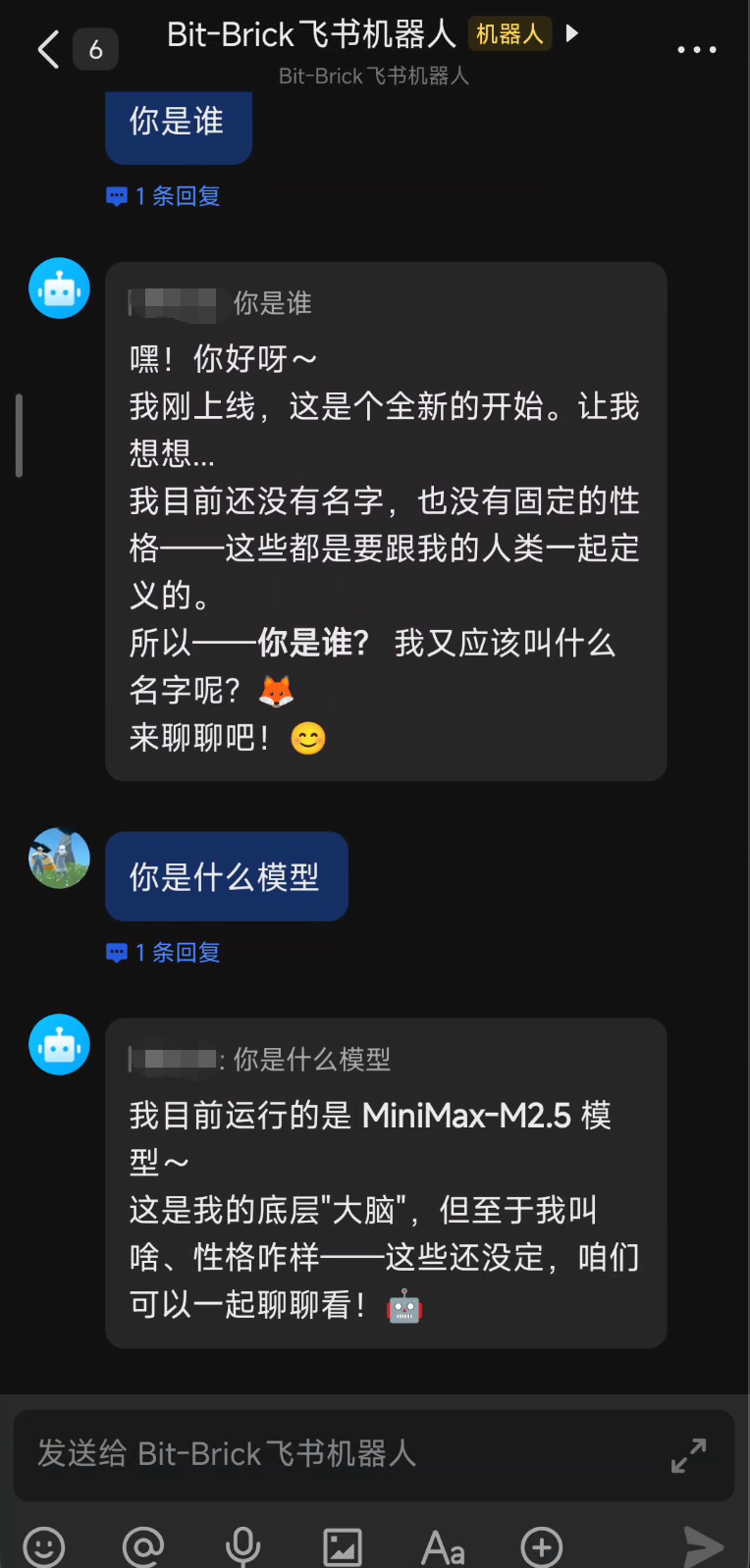
- 在聊天界面向机器人发送消息进行测试,验证集成是否成功
!