3.1.1 MIPI Camera Usage Instructions
环境配置
硬件连接
请将 MIPI 摄像头模组连接至开发板的 MIPI CSI 接口。具体连接方式可参考下图所示:
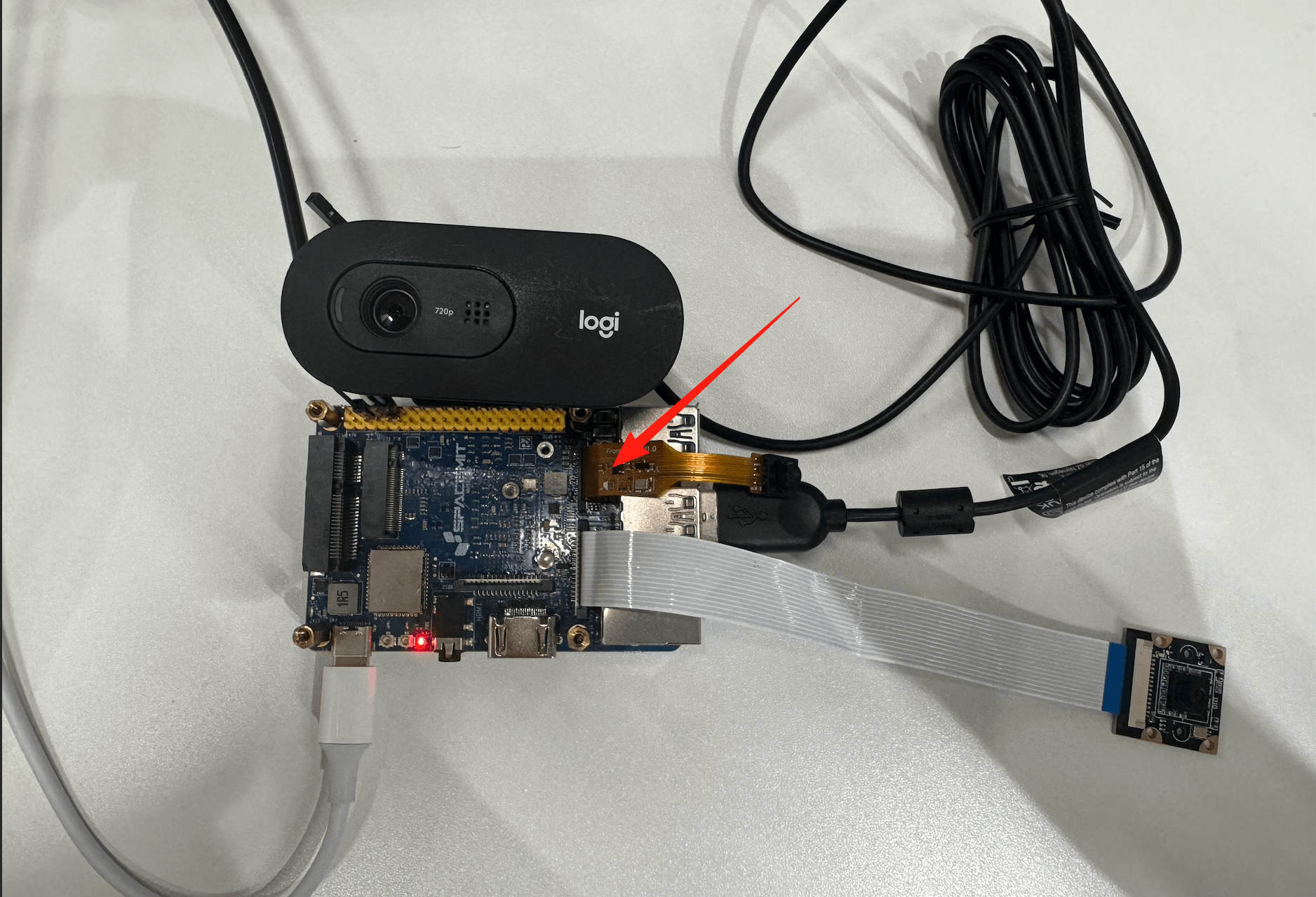
同时,开发板与显示器之间请使用 HDMI 线缆进行连接,以便输出图像画面。
设备测试
1)探测摄像头并生成配置文件
首先确认摄像头所连接的 MIPI CSI 接口编号。例如若连接至 CSI1,则运行以下命令:
cam-test /usr/share/camera_json/csi1_camera_detect.json
若摄像头为已支持型号,系统将自动识别,并输出如下日志,同时在 /tmp/ 目录下生成配置文件:
...
I: ./sensors/cam_sensors_module.c(239): "detect imx219_spm sensors in csi3: success, set 1920x1080 to 1920x1080"
I: auto_detect_camera(1430): "auto detect sensor ===================== finish "
E: update_json_file(709): "Open /usr/share/camera_json/csi3_camera_auto.json file fail"
E: update_json_file(709): "Open /usr/share/csi3_camera_auto.json file fail"
I: update_json_file(723): "save json to /tmp/csi1_camera_auto.json success"
⚠️ 若无法确认 CSI 接口编号,请参考 MUSE 系列开发板用户手册 或尝试 CSI1 ~ CSI3 接口逐个测试。若均无法识别,可能为硬件故障或未适配的摄像头,后者情况下,建议参考官方文档 Camera Development Guide | Bianbu Linux 进行适配操作。
2)复制并修改 JSON 文件
将自动生成的摄像头配置文件复制至指定路径,并重命名为 svivi_cam1.json:
sudo cp /tmp/csi1_camera_auto.json /root/svivi_cam1.json
打开该 JSON 文件,在顶层添加如下字段以启用 Virtual Camera 模式:
"use_v4l": 1
3)出图测试验证
使用调试工具 v4l2_test_spacemit 进行图像采集测试。
下载安装与编译:
mkdir v4l2_test_spacemit
wget https://archive.spacemit.com/ros2/code/v4l2_test_spacemit.tar.gz
tar xvzf v4l2_test_spacemit.tar.gz
gcc v4l2_capture.c v4l2_main.c v4l2_output.c v4l2_stream.c v4l2_common.c -o v4l2_test_spacemit --static
执行采图命令:
./v4l2_test_spacemit \
--device /dev/video50 \
--set-fmt-video width=1920,height=1080,pixelformat=NV12 \
--verbose \
--stream-dmabuf \
--stream-loop \
--stream-save 10 \
--stream-to=test.yuv
正常输出示例:
...
VIDIOC_DQBUF: ok, type:9
VIDIOC_QBUF: ok, type:9
do_handle_cap:723 [INFO]m2m capture dequeue----------------: 15
...
使用
Ctrl+C可中断采集⚠️ 注意事项:
- 最大支持分辨率为 1920×1080(1080p)
- 仅支持图像格式:NV12
- 内存类型要求:dmabuf
至此,说明 MIPI 摄像头可用,可以进行后续流程。
C++ 接口
以下示例展示了如何使用 JDK 提供的 C++ 接口完成 MIPI 相机图像的采集与显示:
// 打开摄像头节点
auto camera = JdkCamera::create("/device/video50", 1920, 1080, V4L2_PIX_FMT_NV12);
// 初始化显示模块(vo)
auto jdkvo = std::make_shared<JdkVo>(1920, 1080, PIXEL_FORMAT_NV12);
// 获取一帧图像数据
auto frame = camera->getFrame();
// 将图像帧发送至显示模块
auto ret = jdkvo->sendFrame(frame);
快速开始
本节介绍如何在开发板上使用 JDK 提供的 MIPI 摄像头采集 SDK 进行编译与运行。
1)将源码包 jdk_cam.tar 下载至开发板本地,并解压:
tar xvf jdk_cam.tar
解压后目录结构如下:
jdk_cam/
├── Makefile
├── .clang-format
├── src/
│ └── main.cpp
└── workspace/
2)进入源码目录,编译 SDK:
cd jdk_cam
make all
编译成功后,执行文件 jdk_cam 将生成于 workspace/ 目录下:
./workspace/jdk_cam
3)加载 jdk_dma 驱动模块,加载之前确保驱动模块已安装:
insmod /opt/jdk/ko/jdk_dma.ko
4)运行采集程序并指定 MIPI 摄像头设备节点(如 /dev/video50):
./workspace/jdk_cam /dev/video50
正常运行时,终端将输出摄像头采集与显示初始化的日志信息。例如:
start buffer preprocessing
start buffer queue
VIDIOC_STREAMON succeeded
[MPP-DEBUG] 10419:VO_CreateChannel:43 create VO Channel success!
[MPP-DEBUG] 10419:module_init:159 +++++++++++++++ module init, module type = 101
[MPP-DEBUG] 10419:check_vo_sdl2:121 yeah! have vo_sdl2---------------
[MPP-DEBUG] 10419:find_vo_sdl2_plugin:86 yeah! we have vo_sdl2_plugin plugin---------------
[MPP-DEBUG] 10419:module_init:207 ++++++++++ VO_SDL2 (/usr/lib/libvo_sdl2_plugin.so)
[MPP-DEBUG] 10419:module_init:207 ++++++++++ open (/usr/lib/libvo_sdl2_plugin.so) success !
[MPP-ERROR] 10419:al_vo_init:93 SDL could not initialize! SDL_Error: wayland not available
[MPP-ERROR] 10419:al_vo_init:128 k1 vo_sdl2 init fail
[MPP-DEBUG] 10419:VO_Init:66 init VO Channel, ret = -400
[MPP-ERROR] 10419:JdkVo:32 VO_init failed, please check!
[MPP-DEBUG] 10419:VO_Process:82 vo one packet, ret = 0
index:0,dma_fd:12 width:1920,height:1080,size:3110400
运行效果
程序运行后,摄像头采集到的图像将在显示器上实时呈现,如下图所示: