
K1 OH5.0 系统调试说明
修订记录
| 修订版本 | 修订日期 | 修订说明 |
| 001 | 2025-01-13 | 初始版本 |
| 002 | 2025-04-11 | 添加MUSE Pi Pro |
| 003 | 2025-07-17 | 添加cppcrash定位方法 |
| 004 | 2025-07-25 | 添加“打印堆栈”章节 |
1. 调试工具和方法
1.1 串口调试
系统默认支持串口调试,波特率为 115200。 通过串口可查看 U-Boot、Kernel 以及 OpenHarmony init 进程的相关日志输出。
1.1.1 调整串口打印等级
1.1.1.1 仅本次启动有效
串口中执行如下命令即可:
echo 8 > /proc/sys/kernel/printk
1.1.1.2 持续生效
主要通过修改 env_k1-x.txt 文件中的 loglevel 值来实现,有 2 种方式:
-
修改代码并编译固件
- 修改
device/board/spacemit/xxx/kernel/boot/bootfs/env_k1-x.txt中loglevel的值 - 重新编译固件并烧录即可
- 修改
-
系统中直接修改,按照如下步骤进行:
- 挂载内核
# cd dev/block/
# ls
by-name loop5 mmcblk2p1 mmcblk2p3 mmcblk2p9 ram12 ram4
loop0 loop6 mmcblk2p10 mmcblk2p4 platform ram13 ram5
loop1 loop7 mmcblk2p11 mmcblk2p5 ram0 ram14 ram6
loop2 mmcblk2 mmcblk2p12 mmcblk2p6 ram1 ram15 ram7
loop3 mmcblk2boot0 mmcblk2p13 mmcblk2p7 ram10 ram2 ram8
loop4 mmcblk2boot1 mmcblk2p2 mmcblk2p8 ram11 ram3 ram9
#
# mount mmcblk2p5 /tmp
# cd /tmp
# ls
Image.itb bianbu.bmp env_k1-x.txt k1-x_ZT001H.dtb lost+found- 使用
hdc工具拉取env_k1-x.txt,修改后,再推入/tmp文件夹
D:\>hdc file recv /tmp/env_k1-x.txt
FileTransfer finish, Size:134 time:23ms rate:5.83kB/s
D:\>hdc file send env_k1-x.txt /tmp/
FileTransfer finish, Size:134, File count = 1, time:8ms rate:16.75kB/s- 取消挂载内核,重启即可生效
# unmount /tmp
# reboot
1.1.2 串口连接方式
1.1.2.1 MUSE Paper
MUSE Paper 可以通过 TF 卡口来引出串口,需要单独购买配件,如下:
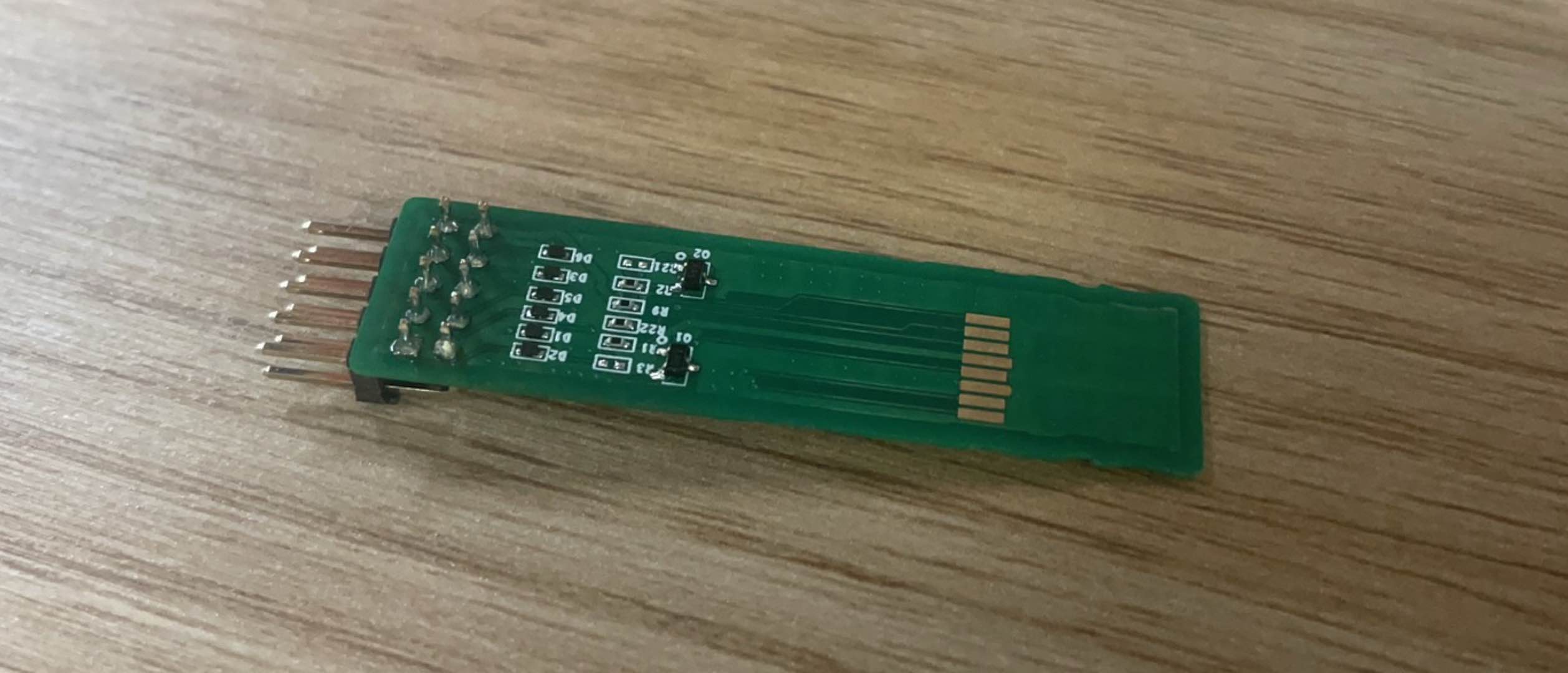
将 TF 卡槽拿出来,将上面配件插入即可,上面配件的金手指朝向桌面。
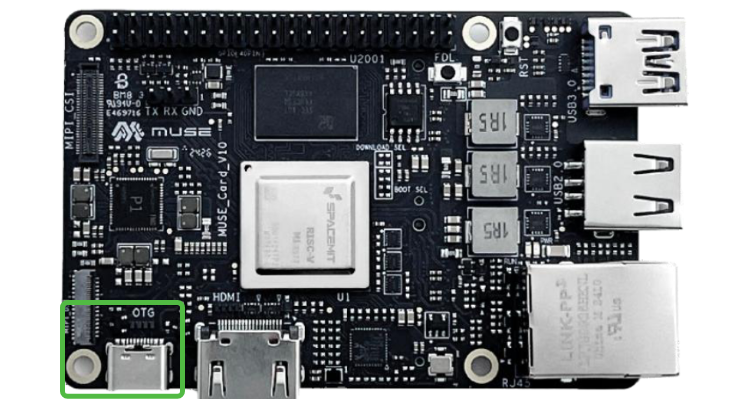
1.1.2.2 MUSE Pi & MUSE Card
MUSE Pi 和 MUSE Card 开发板上面有明显的串口连接标识 (GND/RX/TX),按线序连接即可。
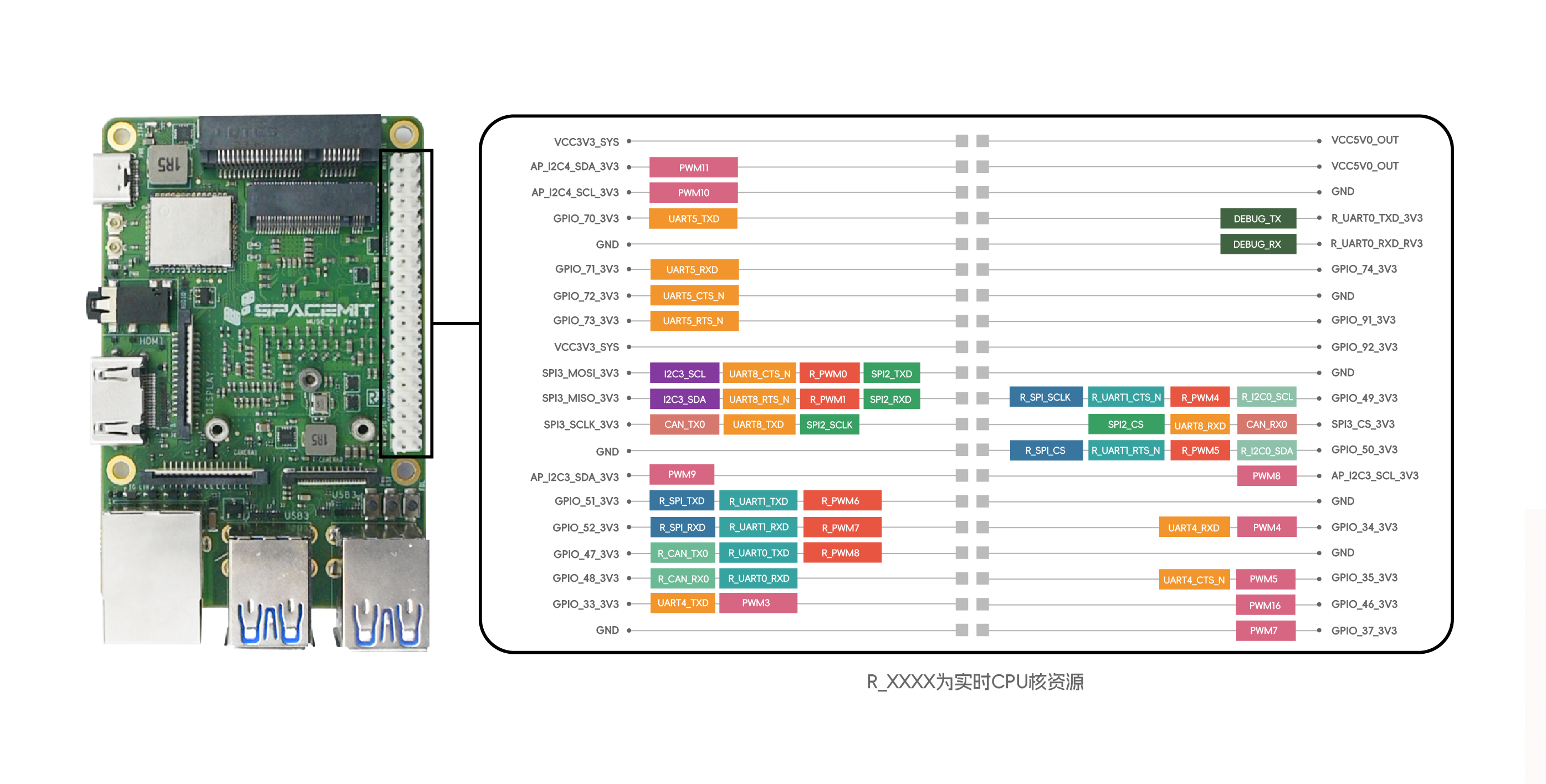
1.1.2.3 MUSE Pi Pro
1.1.2.4 MUSE Book
1.2 HDC
HDC(Harmony Device Connector)功能类似于 Android 的 ADB,支持 USB 和 TCP 两种连接模式。
在使用 TCP 模式时,默认端口为 55555。
配置文件路径:device/board/spacemit/xxx/cfg/default.para
示例如下:
persist.hdc.mode=usb,tcp
persist.hdc.port=55555
1.2.1 主机支持 HDC
1.2.1.1 Windows 系统
Windows 系统将 hdc.exe(点我下载)放在特定目录,并设置环境变量路径。
1.2.1.2 Ubuntu 系统
-
安装依赖项:打开终端,输入以下命令来更新软件包列表并安装必要的开发工具和库
sudo apt-get update
sudo apt-get install build-essential libstdc++6 libc++1· -
下载 HDC 工具包:前往 OpenHarmony 官网下载适用于 Linux 平台的最新版 HDC 工具压缩包。将其放置于合适位置后进行解压操作,请根据实际情况调整解压路径
tar -zxvf hdc_std_<version>_linux.tar.gz -C /opt/hdc/ -
设置环境变量:编辑用户的 shell 初始化脚本(如
.bashrc),添加以下行至文件末尾:export PATH=$PATH:/opt/hdc/bin
source ~/.bashrc -
验证安装成功与否:在新的终端窗口里尝试运行简单的帮助指令以确认一切就绪,如果能够看到详细的帮助文档,则表明整个过程顺利完成
hdc help
1.2.2 HDC 连接
1.2.2.1 网络连接
需确保 HDC 的服务端和客户端在同一个局域网内,连接方式如下:
D:\>hdc tconn 10.0.90.142:55555
Connect OK
D:\>hdc shell
#
1.2.2.2 USB 连接
D:\>hdc list targets
0123456789ABCDEF
D:\>hdc shell
#
1.2.2.3 多设备连接
通过 -t 参数指定设备即可,如下:
D:\>hdc list targets
0123456789ABCDEF
ABCDEF
D:\>hdc -t 0123456789ABCDEF shell
#
1.2.3 HDC 常用命令
| 命令 | 用途 |
| hdc list targets | 查看当前所有设备 |
| hdc shell reboot | 重启 |
| hdc uninstall com.example.myapp | 卸载 hap 包 |
| hdc install -r xxx.hap | 重新安装 hap 包 |
| hdc shell aa start -a EntryAbility -b com.example.myapp | 启动 hap |
| hdc file recv /xxx D:/ | 从设备复制文件到本地 |
| hdc file send D:/xxx /data/ | 发送本地文件到设备 |
| hdc start -r | 重启服务端 |
1.2.4 各设备的 hdc 连接口
1.2.4.1 MUSE Paper & MUSE Paper 2

1.2.4.2 MUSE Pi
1.2.4.3 MUSE Card
1.2.4.4 MUSE Book

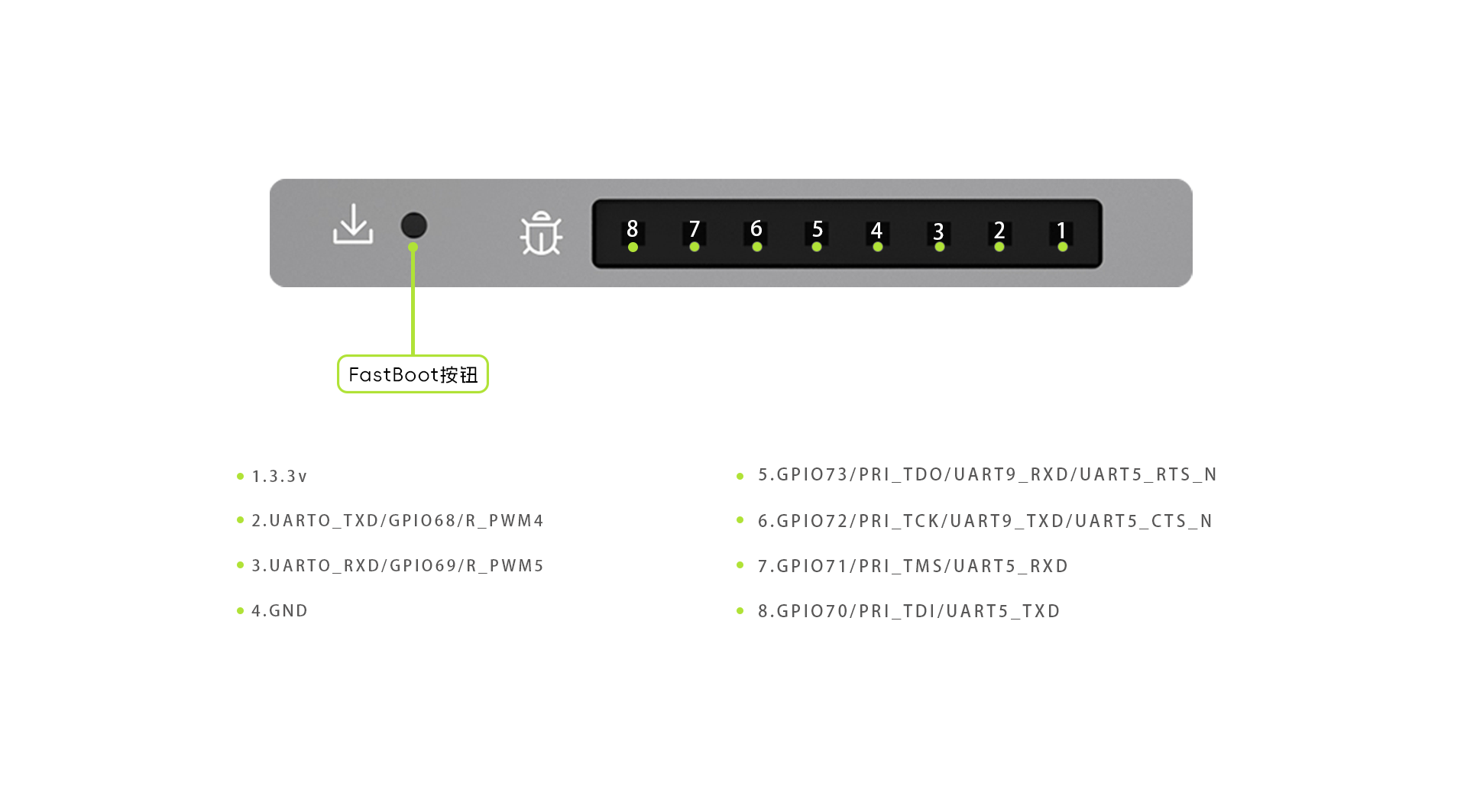
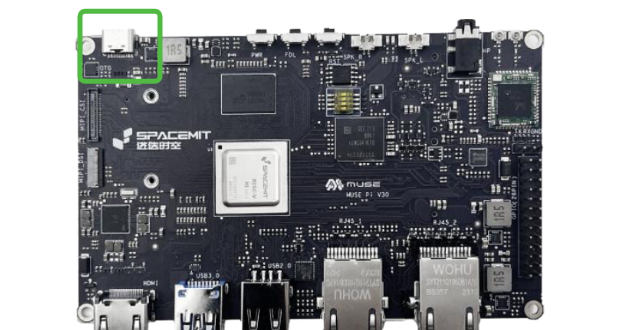
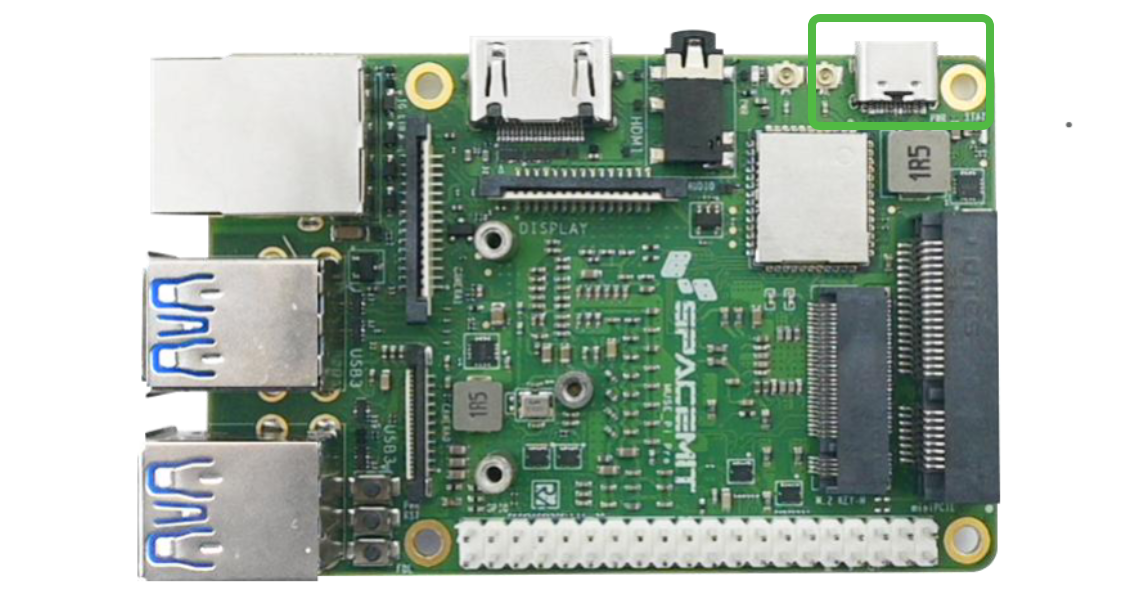
1.2.4.5 MUSE Pi Pro
1.3 hilog
1.3.1. 基本使用方法
hilog 是 OpenHarmony 的日志系统,功能类似于 Android 的 logcat,用于查看和管理系统日志。基本使用方法如下:
hilog
hilog -r
1.3.2 常用命令
| 命令 | 用途 | 示例 |
| hilog -h | 获取帮助 | |
| hilog -t app|core|kmsg|init | - 阻塞式实时查询模块日志 - 可以与其他参数同时使用 | hilog -t core |
| hilog -t app|core|kmsg|init -x | - 非阻塞式实时查询模块日志 - 可以与其他参数同时使用 | hilog -t core -x |
| hilog -T <tag> | - 模块内指定 tag - 可以与其他参数一起使用 | hilog -T Launcher_Default |
| hilog -L D|I|W|E|F | - 指定 level 查询 - D=Debug, I=Info, W=Warning, E=Error, F=Fatal | hilog -L I |
| hilog -D <domain> | - 日志的服务域,用于指定输出日志所对应的业务领域 - 这是一个十六进制整数,范围从 0x0 到 0xFFFFF。 - 建�议使用 0xAAABB 格式,AAA 表示子系统,BB 表示模块 - 指定 domian 查询 - 可以与其他参数一起使用 | hilog -D 0x0 |
| ^ | - 排除 | hilog -t ^app -T ^BatteryThread |
1.3.3 日志落盘
日志落盘是指将日志保存到文件中,方便后续导出和分析。
| 命令 | 用途 |
| hilog -w start [-f "xxx"] [-l <length>] [-j <jobid>] [-m <algorithm>] [-n <number>] | 启动落盘任务 |
| hilog -w query [-j <jobid>] | 查询落盘任务 |
| hilog -w stop [-j <jobid>] | 停止落盘任务 |
示例如下:
# hilog -w query
#
#hilog -w start -f "hilog" -l 66k -j 222 -m zlib -n 2
Persist task [jobid:222] started successfully
#cd /data/log/hilog
# ls -al
total 100
drwxr-x--- 2 logd log 4096 1970-01-02 03:34 .
drwxrwx--- 6 system log 4096 1970-01-01 00:38 ..
-rw-r----- 1 logd system 65540 1970-01-02 03:34 .persisterInfo_222
-rw-r----- 1 logd system 132 1970-01-02 03:34 .persisterInfo_222.info
-rw-r----- 1 logd system 12239 1970-01-02 03:34 hilog.002.19700102-033431.gz
-rw-r----- 1 logd system 6883 1970-01-02 03:34 hilog.003.19700102-033431.gz
#
# hilog -w query -j 222 #指定jobid查询
222 core,app zlib /data/log/hilog/hilog 67584 2
#
# hilog -w query #查询全部落盘任务
222 core,app zlib /data/log/hilog/hilog 67584 2
#
# hilog -w stop -j 222
Persist task [jobid:222] stopped successfully
#
# ls -al
total 36
drwxr-x--- 2 logd log 4096 1970-01-02 03:35 .
drwxrwx--- 6 system log 4096 1970-01-01 00:38 ..
-rw-r----- 1 logd system 12239 1970-01-02 03:34 hilog.002.19700102-033431.gz
-rw-r----- 1 logd system 13000 1970-01-02 03:35 hilog.003.19700102-033431.gz
1.4 hidumper
hidumper 是 OpenHarmony 中为开发、测试人员,IDE 工具提供统一的系统信息获取工具,帮助使用者分析,定位问题。
| 命令 | 用途 |
| hidumper -h | 获取帮助 |
| hidumper --cpuusage [pid] | 查看某个进程的 CPU 占用信息 |
| hidumper --mem [pid] | 查看某个进程的内存占用情况 |
| hidumper --cpufreq | 查看 CPU 的频率 |
| hidumper --storage | 查看存储情况 |
| hidumper --net | 查看网络情况 |
1.5 参数管理
| 命令 | 用途 |
| param -h | 获取帮助 |
| param ls -r | 查看所用系统参数 |
| param ls -r persist.sys.hilog.debug.on | 查看系统参数 |
| param get persist.sys.hilog.debug.on | 获取系统参数 |
| param set persist.sys.hilog.debug.on true | 设置系统参数 |
1.6 模拟按键
1.6.1 鼠标操作
# uinput -?
Usage: uinput <option> <command> <arg>...
The option are:
-M --mouse
commands for mouse:
-m <dx> <dy> --move <dx> <dy> -move to relative position (dx,dy),
<dx1> <dy1> <dx2> <dy2> [smooth time] --trace -dx1 dy1 to dx2 dy2 smooth movement
-d <key> --down key -press down a button,
0 is the left button, 1 is the right,
2 is the middle
-u <key> --up <key> -release a button
-c <key> --click <key> -press the left button down,then raise
-b <dx1> <dy1> <id> [press time] [click interval time] --double click
[press time] the time range is more than 1ms but less than 300ms,
[click interval time] the time range is more than 1ms but less than 450ms,
Otherwise the operation result may produce error or invalid operation
-press the left button down,then raise
key value:0 - button left
key value:1 - button right
key value:2 - button middle
key value:3 - button side
key value:4 - button extra
key value:5 - button forward
key value:6 - button back
key value:7 - button task
-s <key> --scroll <key> -positive values are sliding backwards
-g <dx1> <dy1> <dx2> <dy2> [total time] --drag <dx1> <dy1> <dx2> <dy2> [total time],
dx1 dy1 to dx2 dy2 smooth drag
-i <time> --interval <time> -the program interval for the (time) milliseconds
negative values are sliding forwards
1.6.1.1 命令示例
| 命令 | 用途 |
| uinput -M -m 50 50 | 鼠标光标移动到(50,50)位置 |
| Uinput -M -b 50 200 0 100 300 | 鼠标在(50,200)左键双击,点击事件 100ms,双击的间隔时间 300ms |
1.6.2 键盘操作
# uinput -?
Usage: uinput <option> <command> <arg>...
The option are:
-K --keyboard
commands for keyboard:
-d <key> --down <key> -press down a key
-u <key> --up <key> -release a key
-l <key> [long press time] --long_press <key> [long press time] -press and hold the key
-i <time> --interval <time> -the program interval for the (time) milliseconds
1.6.2.1 按键值
| Keys | keycode |
| KEYCODE_HOME | 1 |
| KEYCODE_BACK | 2 |
| KEYCODE_VOLUME_UP | 16 |
| KEYCODE_VOLUME_DOWN | 17 |
| KEYCODE_POWER | 18 |
| KEYCODE_VOLUME_MUTE | 22 |
| KEYCODE_DPAD_UP | 2012 |
| KEYCODE_DPAD_DOWN | 2013 |
| KEYCODE_DPAD_LEFT | 2014 |
| KEYCODE_DPAD_RIGHT | 2015 |
| KEYCODE_DPAD_CENTER | 2016 |
| KEYCODE_TAB | 2049 |
1.6.2.2 命令示例
| 命令 | 用途 |
| uinput -K -d 1 -u 1 | 按 HOME 键返回主界面 |
| uinput -K -d 1 -u 1 | 声音调大 |
1.6.3 触屏操作
# uinput -?
Usage: uinput <option> <command> <arg>...
The option are:
-T --touch
commands for touch:
-d <dx1> <dy1> --down <dx1> <dy1> -press down a position dx1 dy1,
-u <dx1> <dy1> --up <dx1> <dy1> -release a position dx1 dy1,
-m <dx1> <dy1> <dx2> <dy2> [smooth time] --smooth movement
<dx1> <dy1> <dx2> <dy2> [smooth time] -smooth movement,
dx1 dy1 to dx2 dy2 smooth movement
-c <dx1> <dy1> [click interval] -touch screen click dx1 dy1
1.6.3.1 命令提示
待完善
1.7 服务管理
| 命令 | 用途 |
| service_control start pulseaudio | 启动 pulseaudio 服务 |
| service_control stop pulseaudio | 停止 pulseaudio 服务 |
1.8 hiperf
hiperf 使用指导
https://device.harmonyos.com/cn/docs/documentation/guide/subsys-toolchain-hiperf-0000001186316470
1.9 bytrace
通过 hdc 来获取 trace 的方法如下:
- 抓取 trace:
D:\>hdc shell
# param set const.security.developermode.state true
# param set persist.hdc.root 1
# echo > /sys/kernel/debug/tracing/trace
# echo 4096 > /sys/kernel/debug/tracing/saved_cmdlines_size
# bytrace -t 10 -b 4096 --overwrite ohos zimage zmedia zcamera zaudio ability distributeddatamgr graphic freq irq mdfs workq mmc idle notification sync pagecache ace app > /mnt/mynewtrace.ftrace
# echo > /sys/kernel/debug/tracing/trace
# exit
D:\>hdc file recv /mnt/mynewtrace.ftrace
查看trace:
https://ui.perfetto.dev(科学上网)
查看 trace:
1.10 bootchart
使用方法:
- 抓数据
hdc shell begetctl bootchart enable
hdc shell reboot # 重启
...
重启完成后
...
hdc shell begetctl bootchart stop
hdc shell begetctl bootchart disable
进入到/data/service/el0/startup/init/文件夹下查看是否有如下文件:
header、proc_diskstats.log、proc_ps.log、proc_stat.log
在/data/service/el0/startup/init/目录下执行命令:tar -czf bootchart.tgz * # 打包
hdc file recv /data/service/el0/startup/init/bootchart.tgz ./ # 导出
- 下载 bootchart.jar,点我下载
- 数据转图片,执行如下命名,会生成
bootchart.png
java -jar bootchart.jar bootchart.tgz
如果执行该命令报错,如下,需要升级本机 java 版本
D:\>java -jar bootchart.jar bootchart.tgz
Exception in thread "main" java.lang.UnsupportedClassVersionError: org/bootchart/Main has been compiled by a more recent version of the Java Runtime (class file version 55.0), this version of the Java Runtime only recognizes class file versions up to 52.0
at java.lang.ClassLoader.defineClass1(Native Method)
at java.lang.ClassLoader.defineClass(Unknown Source)
at java.security.SecureClassLoader.defineClass(Unknown Source)
at java.net.URLClassLoader.defineClass(Unknown Source)
at java.net.URLClassLoader.access$100(Unknown Source)
at java.net.URLClassLoader$1.run(Unknown Source)
at java.net.URLClassLoader$1.run(Unknown Source)
at java.security.AccessController.doPrivileged(Native Method)
at java.net.URLClassLoader.findClass(Unknown Source)
at java.lang.ClassLoader.loadClass(Unknown Source)
at sun.misc.Launcher$AppClassLoader.loadClass(Unknown Source)
at java.lang.ClassLoader.loadClass(Unknown Source)
at sun.launcher.LauncherHelper.checkAndLoadMain(Unknown Source)
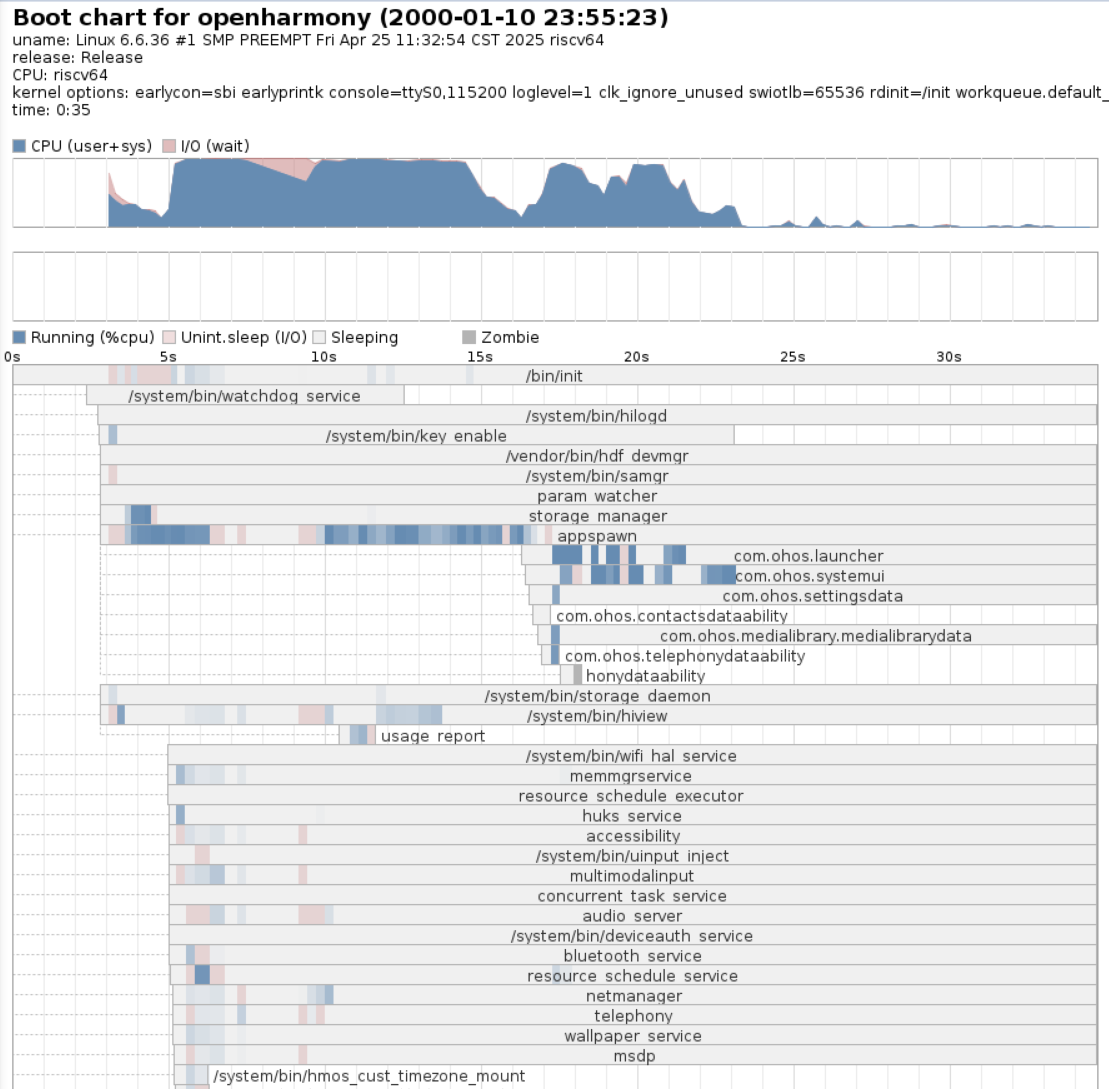
- 生成的
bootchart.png如下:
1.11 wpa_supplicant & wpa_cli
使用方法:
1. 开启再关闭wifi
2. cd /vendor/bin/
3. ./wpa_supplicant -B -i wlan0 -c /data/service/el1/public/wifi/wpa_supplicant/wpa_supplicant.conf
4. ps -ef | grep wpa查看wpa_supplicant是否起来
5. /wpa_cli -p /data/service/el1/public/wifi/sockets/wpa
6. > scan
7. > scan_results
8. > add_network,返回一个ID
9. > set_network ID ssid "WIFI名称"
10. > set_network ID psk "WIFI密码"
11. > enable_network ID
1.12 snapshot_display
param set const.security.developermode.state true
param set persist.hdc.root 1
snapshot_display -f /data/local/tmp/test1.jpeg
1.13 wukong
待完善
1.14 power-shell
power-shell setmode 602 #性能模式,关闭休眠
power-shell suspend #休眠
power-shell display -s xxx #设置亮度
1.15 重新挂载 system/vendor 分区为可读写
system/vendor 分区默认挂载为只读(ro),当调试的时候需要使用 hdc file send 推文件的时候,需要将其重新挂载为可读写,如下:
mount -o remount,rw /vendor
mount -o remount,rw /
系统重启后失效,需要重新挂载
1.16 gdb 调试
待添加
1.17 调频
1.17.1 CPU 频率
cd /sys/devices/system/cpu/cpufreq/policy0/
cat scaling_cur_freq
# 查看当前频率
cat scaling_available_frequencies
# 查看可用频率
echo userspace > scaling_governor
echo 1228800 > scaling_setspeed
# 调整频率
cat scaling_cur_freq
# 查看调整是否生效
1.17.2 DDR 调频
# 频率表:
# 2400M C
# 1600M A
# 1200M 8
# 800M 4
# 600M 2
devmem 0xd4282980 4
# 读取当前频率
devmem 0xd4282980 4 0xX
# 设置频率,0xX值要比频率表的值+1,相当于bit0写1
# 比如设置2400M,devmem 0xd4282980 32 0xD
1.17.3 EMMC 调频
待添加
2. 常用测试方法
2.1 monkey 测试
2.1.1 环境配置(Windows)
- 安装 Python 3.8 或更高版本及相关库。
- 安装
hdc设备链接工具并配置环境变量,保证cmd命令窗口中可以执行hdc shell或者hdc_std shell正确链接测试设备 - 下载
stablility_test_tool_v1.0这个 Python 测试工具包
2.1.2 执行测试
D:\stablility_test_tool_v1.0>python.exe D:\stablility_test_tool_v1.0\monkey_test.py -d H1241200045 -p hdc -i 1000 -t 1000
参数说明:
- -d:测试设备的 SN 序列号,可通过
hdc list targets查询 - -p:HDC 工具路径,可能为
hdc或hdc_std,根据配置的环境变量修改。 - -i:操作间隔时间(单位:ms)。建议设置为 500ms。若硬件性能较低,不建议设置过短,以免系统压力过大。
- -t:测试持续时间(单位:分钟)
2.2 循环 reboot
2.2.1 环境配置(Windows)
- 安装 Python 3.8 或更高版本及相关库。
- 安装
hdc设备链接工具并配置环境变量,保证cmd命令窗口中可以执行hdc shell或者hdc_std shell正确链接测试设备 - 下载
stablility_test_tool_v1.0这个 Python 测试工具包
2.2.2 执行测试
D:\stablility_test_tool_v1.0>python.exe D:\stablility_test_tool_v1.0\reboot_test.py -d H1241200045 -p hdc -c 2000
参数说明:
- -d:测试设备的 SN 序列号,可通过
hdc list targets查询 - -p:HDC 工具路径,可能为
hdc或hdc_std,根据配置的环境变量修改。 - -c:开关机循环次数,默认 600 次。每次间隔约 80 秒,最大等待设备重启时间为 300 秒。若需修改两次重启之间的间隔时间,可调整脚本中的
REBOOT_WAIT_TIME参数,但该值不得短于设备完整开机时间。
2.3 循环音乐播放
直接打开“音乐”即可,自动循环播放音乐。
2.4 循环视频播放
下载视频老化专用测试 hap(在这里),通过 hdc 安装
hdc install 视频老化测试.hap
安装完成后,直接点击 Launcher 桌面上的图标运行即可,会自动循环播放。
2.5 GPU 老化测试(glmark)
使用方法:
执行下面3条命令可运行glmark老化:
power-shell setmode 602
cd /system/bin
./glmark2-es2 --run-forever --size 720x720
2.6 CPU 占用率测试
2.6.1 查看进程占用
busybox top -d 1
显示如下:
Mem: 2282216K used, 1500976K free, 201532K shrd, 25944K buff, 788888K cached
CPU: 19.7% usr 5.5% sys 0.0% nic 74.7% idle 0.0% io 0.0% irq 0.0% sirq
Load average: 4.00 3.21 2.99 5/1032 28162
PID PPID USER STAT VSZ %VSZ CPU %CPU COMMAND
17110 196 20010043 R< 4329m116.6 5 15.2 com.isrc.Aidraw
553 1 graphics R< 2239m 60.3 2 6.2 /system/bin/render_service
482 1 composer S< 2067m 55.7 5 1.8 composer_host 9 composer
191 1 logd S 2073m 55.8 4 0.2 /system/bin/hilogd
27453 2 root IW 0 0.0 3 0.2 [kworker/u16:1-p]
104 2 root SWN 0 0.0 3 0.2 [pvr_defer_free]
27639 2 root IW 0 0.0 3 0.2 [kworker/u16:4-p]
1528 1 wifi S 2166m 58.3 7 0.1 wifi_manager_service
194 1 samgr S 2090m 56.3 5 0.1 /system/bin/samgr
491 1 foundati S< 2290m 61.7 7 0.0 foundation
633 1 root S 2194m 59.1 6 0.0 /system/bin/hdcd
28140 4848 root R 2048 0.0 6 0.0 busybox top -d 5
265 2 root SW 0 0.0 5 0.0 [ksdioirqd/mmc1]
1602 196 10009 S< 4156m112.0 7 0.0 {m.ohos.systemui} com.ohos.systemu
197 1 hiview S 2226m 60.0 2 0.0 /system/bin/hiview
358 1 radio S 2198m 59.2 1 0.0 telephony
540 1 powermgr S< 2169m 58.4 7 0.0 powermgr
362 1 net_mana S 2145m 57.8 2 0.0 netmanager
518 1 sensor S 2090m 56.3 5 0.0 sensors
1444 1 hidumper S 2085m 56.2 0 0.0 hidumper_service
2.6.2 查看线程占用
busybox top -d 1 -H
显示如下:
Mem: 2283100K used, 1500092K free, 201532K shrd, 26020K buff, 788928K cached
CPU: 20.0% usr 6.1% sys 0.0% nic 73.8% idle 0.0% io 0.0% irq 0.0% sirq
Load average: 4.71 3.78 3.22 1/1028 28553
PID PPID USER STAT VSZ %VSZ CPU %CPU COMMAND
17110 196 20010043 S< 4337m116.9 1 8.5 com.isrc.Aidraw
17147 196 20010043 S< 4337m116.9 3 7.0 {RSRenderThread} com.isrc.Aidraw
553 1 graphics S< 2239m 60.3 7 4.9 /system/bin/render_service
521 1 composer S< 2067m 55.7 6 1.6 {OS_IPC_1_521} composer_host
22641 1 graphics S< 2239m 60.3 1 0.6 /system/bin/render_service
962 1 graphics S< 2239m 60.3 5 0.4 {OS_IPC_3_962} /system/bin/render_
1914 1 graphics S< 2239m 60.3 3 0.3 {OS_IPC_5_1914} /system/bin/render
200 1 logd S 2073m 55.8 5 0.2 {hilogd.server} /system/bin/hilogd
27639 2 root IW 0 0.0 0 0.2 [kworker/u16:4-e]
104 2 root SWN 0 0.0 5 0.2 [pvr_defer_free]
27453 2 root IW 0 0.0 5 0.2 [kworker/u16:1-e]
840 1 composer S< 2067m 55.7 7 0.1 {OS_IPC_1_521} composer_host
17162 196 20010043 S< 4337m116.9 2 0.1 {RSRenderThread} com.isrc.Aidraw
17163 196 20010043 S< 4337m116.9 2 0.1 {RSRenderThread} com.isrc.Aidraw
843 1 graphics S< 2239m 60.3 6 0.1 {VSyncGenerator} /system/bin/rende
18029 1 wifi S 2166m 58.3 3 0.0 {OS_IPC_5_18029} wifi_manager_serv
1579 1 wifi S 2166m 58.3 2 0.0 {OS_IPC_2_1579} wifi_manager_servi
28522 4848 root R 2180 0.0 5 0.0 busybox top -d 10 -H
862 1 graphics S< 2239m 60.3 5 0.0 {RSBackgroundThr} /system/bin/rend
1012 1 samgr S 2090m 56.3 4 0.0 {OS_IPC_5_1012} /system/bin/samgr
2.6.3 查看每个 CPU 的占用
busybox top -d 1
出现结果后再按1
显示如下:
Mem: 2283348K used, 1499844K free, 201532K shrd, 26124K buff, 788948K cached
CPU0: 0.0% usr 0.0% sys 0.0% nic 100% idle 0.0% io 0.0% irq 0.0% sirq
CPU1: 0.0% usr 0.0% sys 0.0% nic 100% idle 0.0% io 0.0% irq 0.0% sirq
CPU2: 0.0% usr 0.0% sys 0.0% nic 100% idle 0.0% io 0.0% irq 0.0% sirq
CPU3: 83.3% usr 0.0% sys 0.0% nic 16.6% idle 0.0% io 0.0% irq 0.0% sirq
CPU4: 85.7% usr 14.2% sys 0.0% nic 0.0% idle 0.0% io 0.0% irq 0.0% sirq
CPU5: 50.0% usr 12.5% sys 0.0% nic 37.5% idle 0.0% io 0.0% irq 0.0% sirq
CPU6: 12.5% usr 12.5% sys 0.0% nic 75.0% idle 0.0% io 0.0% irq 0.0% sirq
CPU7: 0.0% usr 42.8% sys 0.0% nic 57.1% idle 0.0% io 0.0% irq 0.0% sirq
Load average: 4.66 4.04 3.37 5/1038 28867
PID PPID USER STAT VSZ %VSZ CPU %CPU COMMAND
17110 196 20010043 R< 4337m116.9 3 24.8 com.isrc.Aidraw
553 1 graphics R< 2239m 60.3 5 9.8 /system/bin/render_service
482 1 composer S< 2067m 55.7 5 2.8 composer_host 9 composer
1528 1 wifi S 2166m 58.3 7 0.4 wifi_manager_service
191 1 logd S 2073m 55.8 7 0.4 /system/bin/hilogd
28864 4848 root R 2048 0.0 7 0.4 busybox top -d 10
27453 2 root IW 0 0.0 7 0.4 [kworker/u16:1-p]
358 1 radio S 2198m 59.2 1 0.2 telephony
194 1 samgr S 2090m 56.3 5 0.2 /system/bin/samgr
104 2 root RWN 0 0.0 7 0.2 [pvr_defer_free]
27639 2 root IW 0 0.0 7 0.2 [kworker/u16:4-p]
1602 196 10009 S< 4164m112.2 1 0.0 {m.ohos.systemui} com.ohos.systemu
1576 196 20010014 S< 4099m110.4 7 0.0 {m.ohos.launcher} com.ohos.launche
2.7 GPU 占用率测试
使用如下命令:
cat /sys/kernel/debug/pvr/status
显示如下:
# cat /sys/kernel/debug/pvr/status
Driver Status: OK
Device ID: 0:128
Firmware Status: OK
Server Errors: 1
HWR Event Count: 0
CRR Event Count: 0
SLR Event Count: 0
WGP Error Count: 0
TRP Error Count: 0
FWF Event Count: 0
APM Event Count: 0
GPU Utilisation: 2%
VM0
2D Utilisation: 0%
GEOM Utilisation: 0%
3D Utilisation: 2%
CDM Utilisation: 0%
RAY Utilisation: 0%
GEOM2 Utilisation: 0%
3. 常见问题调试手段
3.1 外设
3.1.1 屏幕背光无法调节
- 通过查看和设置节点
sys/class/backlight/backlight/brightness来确认驱动是否正常 - 如果设置上述节点亮度无变化,说明驱动存在问题,需要查驱动,重点查看背光对应的 PWM 是否正常工作
- 如果设置上述节点亮度有变化,说明是 OH 上层的问题,可以通过命令
power-shell display -s xxx(100>xxx>0)``来查看亮度是否有变化
3.2 系统
3.2.1 替换内核
- 挂载内核,可替换
Image.itb和k1-x_ZT001H.dtb(注:dtb文件,不同方案的名称不一样)
# cd dev/block/
# ls
by-name loop5 mmcblk2p1 mmcblk2p3 mmcblk2p9 ram12 ram4
loop0 loop6 mmcblk2p10 mmcblk2p4 platform ram13 ram5
loop1 loop7 mmcblk2p11 mmcblk2p5 ram0 ram14 ram6
loop2 mmcblk2 mmcblk2p12 mmcblk2p6 ram1 ram15 ram7
loop3 mmcblk2boot0 mmcblk2p13 mmcblk2p7 ram10 ram2 ram8
loop4 mmcblk2boot1 mmcblk2p2 mmcblk2p8 ram11 ram3 ram9
#
# mount mmcblk2p5 /tmp
# cd /tmp
# ls
Image.itb bianbu.bmp env_k1-x.txt k1-x_ZT001H.dtb lost+found
- 通过
hdc将更新的内核或者dtb文件推入/tmp文件夹
D:\>hdc file send Image.itb /tmp/
D:\>hdc file send k1-x_ZT001H.dtb /tmp/
- 取消挂载内核,重启即可生效
# unmount /tmp
# reboot
3.2.2 进入 U-Boot
有 2 种方法:
- 开机后,hdc 连接后或者串口连接后,执行
reboot uboot,重启后会进入 U-Boot - 连接串口,关机后,串口输入按住 s 键,上电开机,进入 U-Boot
3.2.3 cppcrash
3.2.3.1 常规 cppcrash 处理方法
cppcrash 一般会在 /data/log/faultlog/faultlogger/ 路径下生成 1 个 log,根据 log 中的堆栈来获得异常代码的函数及行数,来定位问题。
我们以带宽统计工具 ddr_bw 为例子,手动造 1 个 cppcrash 来进行分析:
-
修改 ddr_bw 的代码如下:
fuqiang@snode2:~/workspace/oh5_r_release/device/soc/spacemit$ git diff
diff --git a/k1/tools/ddr_bw/BUILD.gn b/k1/tools/ddr_bw/BUILD.gn
index 17dbd73..f7164bf 100755
--- a/k1/tools/ddr_bw/BUILD.gn
+++ b/k1/tools/ddr_bw/BUILD.gn
@@ -6,6 +6,7 @@ cflags_c_common = [
"-Wno-unused-function",
"-Wno-pointer-to-int-cast",
"-Wno-deprecated-non-prototype",
+ "-O0",
]
cflags_cc_common = [
@@ -13,6 +14,7 @@ cflags_cc_common = [
"-Wno-unused-function",
"-Wno-pointer-to-int-cast",
"-Wno-deprecated-non-prototype",
+ "-O0",
]
ohos_executable("ddr_bw") {
diff --git a/k1/tools/ddr_bw/ddr_bw.c b/k1/tools/ddr_bw/ddr_bw.c
index 7469da8..51d4167 100644
--- a/k1/tools/ddr_bw/ddr_bw.c
+++ b/k1/tools/ddr_bw/ddr_bw.c
@@ -217,6 +217,8 @@ int main(int argc, char **argv)
unsigned int poll_time = 3000;
unsigned int mid = -1;
OPTION_CHOICE o;
+ char *ptr = NULL;
+ *ptr = 'a';
int fd = open("/dev/ddr_bw", O_RDWR);
if (fd < 0) {- 添加
-O0参数:去除编译器优化 - 添加空指针代码,产生异常
- 添加
-
编译 ddr_bw 并将 ddr_bw 推入到机器中,执行 ddr_bw,产生 signal,如下:
# ddr_bw -h
Signal 11 -
在
/data/log/faultlog/faultlogger/中会生成 log,如下:# cd /data/log/faultlog/faultlogger/
# ls
cppcrash-ddr_bw-0-20250717120106
# -
查看 log 中的堆栈:
#00 pc 0000000000002648 /system/bin/ddr_bw(main+112)(ccc496b897ea8db5a3329975bcf3d228)
#01 pc 0000000000081230 /system/lib/ld-musl-riscv64.so.1(libc_start_main_stage2+64)(eef0e3dc54310d303c9e0c2319c54537)
#02 pc 0000000000001e60 /system/bin/ddr_bw(_start_c+70)(ccc496b897ea8db5a3329975bcf3d228)
#03 pc 00000000000758cc /system/lib/ld-musl-riscv64.so.1(__dls3+7038)(eef0e3dc54310d303c9e0c2319c54537) -
通过 addr2line 工具定位异常代码的函数和行数,addr2line 工具的位置在:
prebuilts/ohos-sdk/linux/12/native/llvm/bin/llvm-addr2line,定位到异常发生在 main 函数,ddr_bw.c的 221 行fuqiang@snode2:~/workspace/oh5_r_release$ ./prebuilts/ohos-sdk/linux/12/native/llvm/bin/llvm-addr2line -e out/musepaper2/exe.unstripped/device_musepaper2/spacemit_products/ddr_bw -f 0x2648
main
/data/home/fuqiang/workspace/oh5_r_release/out/musepaper2/../../device/soc/spacemit/k1/tools/ddr_bw/ddr_bw.c:221 -
查看代码发现,确实找到了之前故意添加的空指针代码位置。
210 int main(int argc, char **argv)
211 {
212 struct ddrbw_info *info;
213 int ret;
214 int all_info = 0;
215 int ddr_only = 0;
216 int list_req = 0;
217 unsigned int poll_time = 3000;
218 unsigned int mid = -1;
219 OPTION_CHOICE o;
220 char *ptr = NULL;
221 *ptr = 'a';
222
223 int fd = open("/dev/ddr_bw", O_RDWR);
224 if (fd < 0) {
225 printf("open file failed!\n");
226 return -1;
227 }
3.2.4 打印堆栈
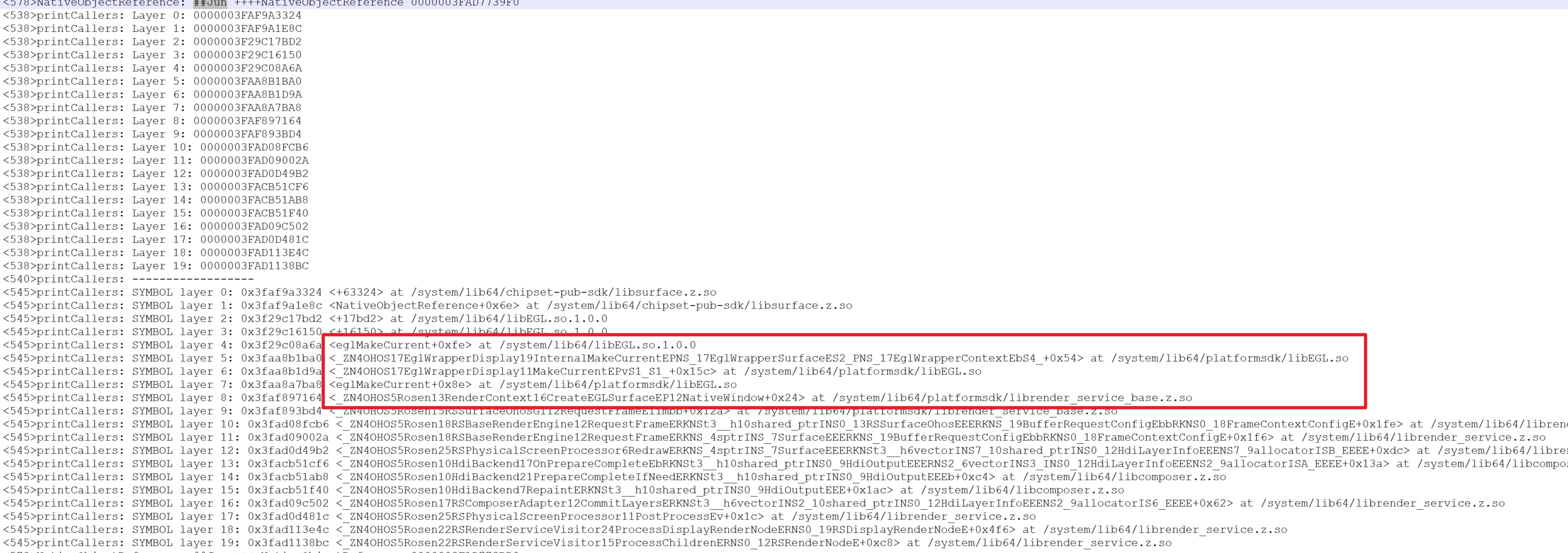
在调试或者跟踪代码的时候,经常需要打印函数�调用栈,可以通过调用 printCallers 接口来实现,具体的接口如下:
#include <execinfo.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#define MAX_FRAMES 20
void printCallers()
{
int layers = 0, i = 0;
char ** symbols = NULL;
void * frames[MAX_FRAMES];
memset(frames, 0, sizeof(frames));
layers = backtrace(frames, MAX_FRAMES);
for (i=0; i<layers; i++) {
printf("Layer %d: %p\n", i, frames[i]);
}
printf("------------------\n");
symbols = backtrace_symbols(frames, layers);
if (symbols) {
for (i=0; i<layers; i++) {
printf("SYMBOL layer %d: %s\n", i, symbols[i]);
}
free(symbols);
}
else {
printf("Failed to parse function names\n");
}
}
将上面的接口放入要打印堆栈的文件中,调用 printCallers 进行打印即可。
打印效��果如下:
3.3 休眠唤醒异常
3.3.1 只关屏,无法深度休眠
- 查看
vendor/spacemit/xxx/power_config/power_mode_config.xml是否设置了禁止深度休眠,具体参考 K1 OH5.0 系统定制说明 的 电源管理定制 章节 - 通过
power-shell dump -a查看系统是否拿了禁止休眠的 - 查看 hilog 和内核 log 是否有异常打印
3.3.2 深度休眠失败
待补充
3.3.3 深度休眠后唤醒失败
查看唤醒源,分析是谁唤醒了系统
cat /sys/kernel/debug/wakeup_sources
打开调试 log
echo 9 > /proc/sys/kernel/printk
echo N > /sys/module/printk/parameters/console_suspend
内核级休眠命令
echo +20 > /sys/class/rtc/rtc0/wakealarm
echo mem > /sys/power/state
OH 系统级休眠命令
power-shell suspend