
MIPI DSI2
芯片名称 内核版本
- RK3576 LINUX Kernel 6.1
- RK3588 LINUX Kernel 5.10/6.1
1. Introduction
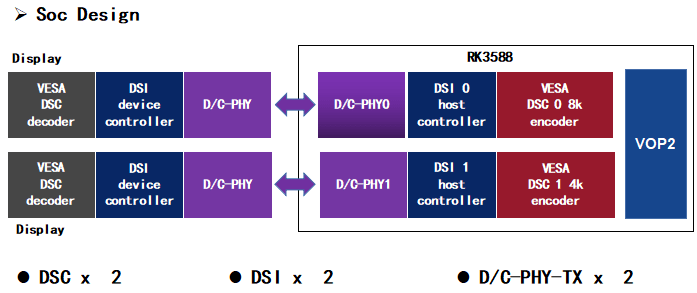
DSI-2 是 MIPI 联盟定义的一组通信协议的一部分,DWC-MIPI-DSI2 是一个实现 MIPI-DSI2 规范中定义的所有协议功能的数字核控制器,可以兼容 D-PHY 和 C-PHY 的物理接口,支持两路的 Display Stream Compression (DSC) 数据传输。
2. MIPI-DSI2 Features
- MIPI® Alliance Specification for Display Serial Interface 2 (DSI-2) Version 1.1
- MIPI® Alliance Specification for Display Command Set (DCS) Version 1.4
- MIPI® Alliance Specification for D-PHY v2.0
- MIPI® Alliance Specification for C-PHY v1.1
- Four data lanes on D-PHY and three data trios on C-PHY
- Bidirectional communication and escape mode through data lane 0
- Continuous and non-continuous clock modes on D-PHY and non-continuous clock mode on C-PHY
- End of Transmission packet (EoTp)
- Scrambling
- VESA DSC 1.1/1.2a
- Up to 4.5 Gbps per lane in D-PHY
- Up to 2.0 Gsps per trio in C-PHY
3. RK3576 与 RK3588 DSI 接口差别
| 功能 | RK3576 | RK3588 |
|---|---|---|
| Dual channel | Not support | Support |
| Max resolution | 2560x1600@60Hz | 4096x2304@60Hz |
| data lanes | 1/2/4 lanes | 1/2/4/8 lanes |
| Max lane rate | D-PHY: 2.5Gbps/lane C-PHY: 1.7Gsps/lane | D-PHY: 4.5Gbps/lane C-PHY: 2.0Gsps/lane |
| Color Format | RGB | RGB |
| Max Color Depth | 10 bit | 10 bit |
| DSC | Not support | Support VESA DSC 1.1/1.2a |
| C-PHY | Support | Support |
4. MIPI DSI-2 Host 与 MIPI DSI Host 的差别
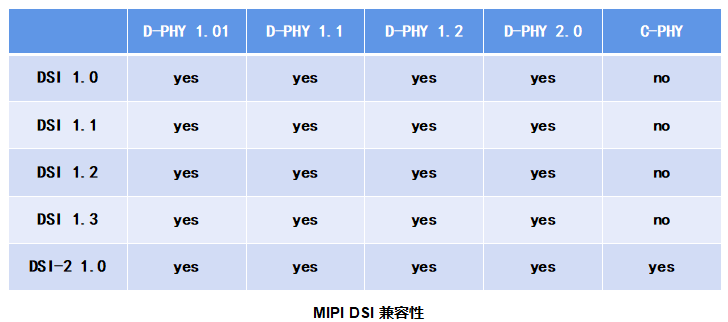
MIPI DSI-2 除了可以兼容 MIPI DSI 的所有协议功能外,还增加支持 MIPI C-PHY。
5. MIPI DPHY 差别
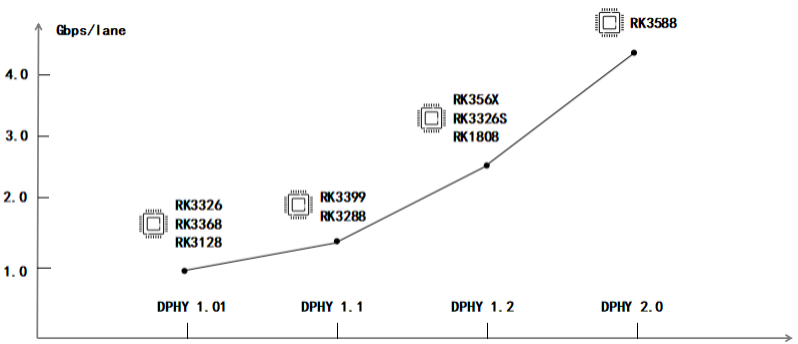
RK3588 平台 MIPI DPHY 不同以往平台 MIPI DPHY 版本,其带宽最高可以到 4.5 Gbps。
6. 应用领域
MIPI DSI 基于差分信号传输,可以降低引脚数量和硬件设计复杂度,并保持良好的硬件兼容性。另外,基于 MIPI DSI 协议的 IP 还具备低功耗、低 EMI 的特性。
其应用领域如下图:
7. 驱动代码说明
7.1 uboot
7.1.1 驱动位置
drivers/video/drm/dw_mipi_dsi2.c
drivers/video/drm/samsung_mipi_dcphy.c
7.1.2 驱动配置
CONFIG_DRM_ROCKCHIP_DW_MIPI_DSI2=y
CONFIG_DRM_ROCKCHIP_SAMSUNG_MIPI_DCPHY=y
7.2 kernel
7.2.1 驱动位置
MIPI DSI-2 host controller:
drivers/gpu/drm/rockchip/dw-mipi-dsi2-rockchip.c
MIPI DCPHY:
drivers/phy/rockchip/phy-rockchip-samsung-dcphy.c
7.2.2 驱动配置
CONFIG_ROCKCHIP_DW_MIPI_DSI=y
CONFIG_PHY_ROCKCHIP_SAMSUNG_DCPHY=y
7.2.3 参考设备树
DTS 路径:
arch/arm64/boot/dts/rockchip/rk3588-evb.dtsi
arch/arm64/boot/dts/rockchip/rk3588-evb1-lp4.dtsi
arch/arm64/boot/dts/rockchip/rk3588-evb2-lp4.dtsi
arch/arm64/boot/dts/rockchip/rk3588-evb3-lp5.dtsi
arch/arm64/boot/dts/rockchip/rk3588-evb4-lp4.dtsi
arch/arm64/boot/dts/rockchip/rk3588s-evb.dtsi
arch/arm64/boot/dts/rockchip/rk3588s-evb1-lp4x.dtsi
arch/arm64/boot/dts/rockchip/rk3588s-evb2-lp5.dtsi
arch/arm64/boot/dts/rockchip/rk3588s-evb4-lp4x.dtsi
dts 配置用例场景说明:
rk3588-evb1: dsi0->dphy->1080p_panel && dsi1->dphy->1080p_panel;
rk3588-evb2: dsi1->dphy->1080p_panel;
rk3588-evb3: dsi0->dphy->1080p_panel && dsi1->cphy->cphy_panel;
rk3588-evb4: dsi0->dphy->1080p_panel;
rk3588s-evb1: dsi0->dphy->1080p_panel && dsi1->dphy->cmd_no_dsc_panel;
rk3588s-evb2: dsi0->cphy->cphy_panel & dsi1->dphy->1080p_panel;
rk3588s-evb4: dsi0->dphy->1080p_panel && dsi1->dphy->cmd_dsc_panel;
8. DSI 控制器和屏端配置
8.1 DTS 配置
&dsi0 {
status = "okay";
//rockchip,lane-rate = <1000>;
//auto-calculation-mode;
//disable-hold-mode;
//support-psr;
};
&dsi0_panel {
status = "okay";
compatible = "simple-panel-dsi";
reg = <0>;
power-supply = <&vcc3v3_lcd_n>;
backlight = <&backlight>;
reset-gpios = <&gpio2 RK_PB4 GPIO_ACTIVE_LOW>;
reset-delay-ms = <10>;
enable-delay-ms = <10>;
prepare-delay-ms = <10>;
unprepare-delay-ms = <10>;
disable-delay-ms = <60>;
dsi,flags = <(MIPI_DSI_MODE_VIDEO | MIPI_DSI_MODE_VIDEO_BURST |
MIPI_DSI_MODE_LPM | MIPI_DSI_MODE_EOT_PACKET)>;
dsi,format = <MIPI_DSI_FMT_RGB888>;
dsi,lanes = <4>;
//phy-c-option;
//compressed-data;
//slice-width = <720>;
//slice-height = <65>;
//version-major = <1>;
//version-minor = <1>;
panel-init-sequence = [
...
05 78 01 11
05 00 01 29
];
panel-exit-sequence = [
05 00 01 28
05 00 01 10
];
disp_timings0: display-timings {
native-mode = <&dsi0_timing0>;
dsi0_timing0: timing0 {
clock-frequency = <132000000>;
hactive = <1080>;
vactive = <1920>;
hfront-porch = <15>;
hsync-len = <4>;
hback-porch = <30>;
vfront-porch = <15>;
vsync-len = <2>;
vback-porch = <15>;
hsync-active = <0>;
vsync-active = <0>;
de-active = <0>;
pixelclk-active = <0>;
};
};
};
8.2 配置说明
8.2.1 通用配置
| Property | Description | Value |
|---|---|---|
| rockchip,lane-rate | 选择手动指定 mipi 通道速率 | 单位可以支持: D-PHY: Mbps/lane 或 Kbps/lane C-PHY: Msps/lane 或 Ksps/lane 比如指定800Mbps: rockchip,lane-rate = <800>;或者 rockchip,lane-rate = <800000>; |
| auto-calculation-mode | 使能 Auto Calculation 工作模式 | 布尔类型 string |
| disable-hold-mode | 不配置 TE 也能刷帧 | 布尔类型 string |
| support-psr | 使能 PSR 功能 | 布尔类型 string |
| compatible | Compatible string | simple-panel-dsi |
| power-supply | 屏端供电 [option] | 相关 regulator 引用 |
| backlight | 背光 | 背光引用 |
| enable-gpios | 屏使能 GPIO [option] | GPIO 引用描述 |
| reset-gpios | 屏复位 GPIO | GPIO 引用描述 |
| reset-delay-ms | panel sequence delay | 参考 panel spec |
| enable-delay-ms | ||
| prepare-delay-ms | ||
| unprepare-delay-ms | ||
| disable-delay-ms | ||
| dsi,flags | DSI2 工作模式 | cmd mode: MIPI_DSI_MODE_LPM | MIPI_DSI_MODE_EOT_PACKET video mode: MIPI_DSI_MODE_VIDEO | MIPI_DSI_MODE_VIDEO_BURST | MIPI_DSI_MODE_LPM | MIPI_DSI_MODE_EOT_PACKET |
| dsi,format | 像素数据格式 | MIPI_DSI_FMT_RGB888 MIPI_DSI_FMT_RGB666 MIPI_DSI_FMT_RGB666_PACKED MIPI_DSI_FMT_RGB565 |
| dsi,lanes | mipi data 通道数 | 1/2/3 trios [cphy] 6 trios [cphy 双通道] 1/2/3/4 lanes [dphy] 8 lanes [dphy 双通道] |
| phy-c-option | C-PHY panel [option] | 布尔类型string |
| compressed-data | 带DSC panel [option] | 布尔类型string |
| slice-width | 定义dsc slice宽 [option] | 参照panel spec |
| slice-height | 定义dsc slice高 [option] | |
| version-major | 定义dsc版本 [option] | 参照panel spec |
| version-minor | ||
| panel-init-sequence | 屏上电初始化序列 | [hex] data_type delay_ms payload_lenth payload |
| panel-exit-sequence | 屏下电初始化序列 | |
| display-timing | panel timing | 参考panel spec |
8.2.2 display Timing
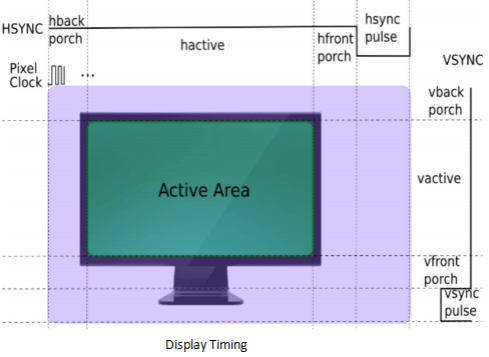
8.2.3 dsi,flags
8.2.3.1 CLK Type
在 MIPI DSI 协议的 5.6.1 时钟要求章节介绍:所有DSI发射器和接收器都应在时钟通道上支持连续时钟行为,并且可以选择性地支持非连续时钟行为,所以显示应用中时钟通道工作在连续模式还是非连续模式取决于显示外设的需求。
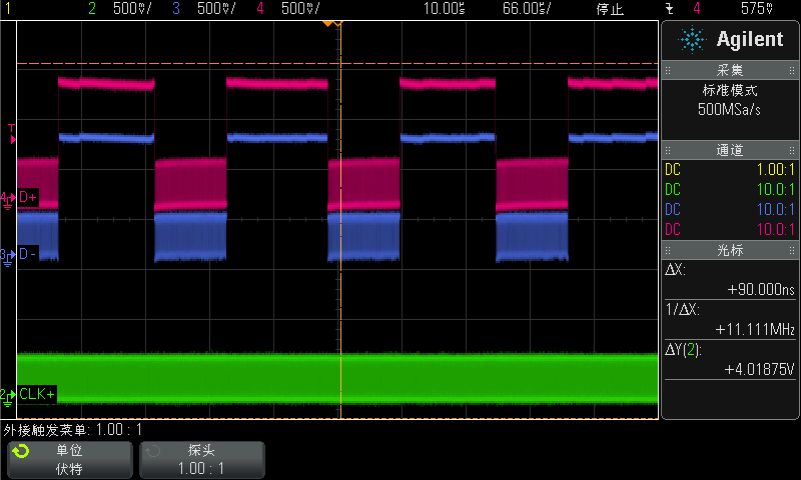
默认情况,MIPI DPHY 的时钟通道工作在连续模式,是 DSI 显示系统中主从都支持的时钟行为,另外如果 DSI 外设需要依赖主机端的时钟工作时,则时钟通道必须工作在连续模式,如下图:
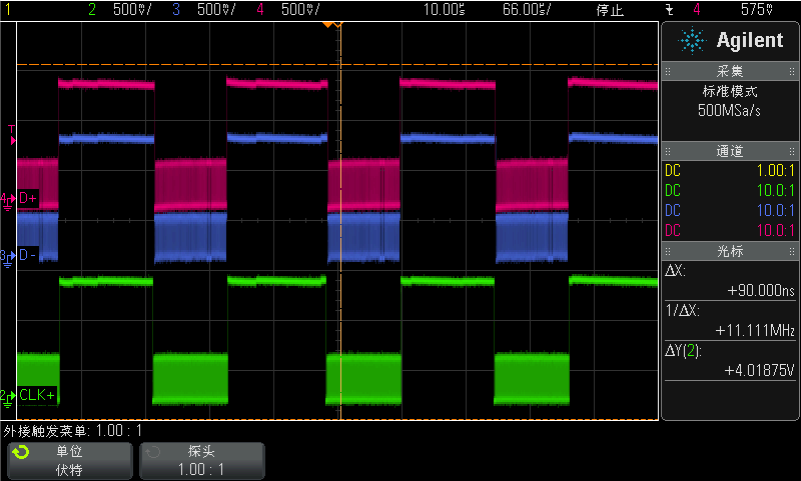
当系统需要考虑节省功耗时,尤其是在传输期间,可以配置成非连续时钟模式,可以避免在不需要数据传输时浪费电力,把 MIPI_DSI_CLOCK_NON_CONTINUOUS 追加到 dsi,flags 时,MIPI DPHY 的时钟通道将会配置成非连续模式,如下图:
8.2.3.2 Eotp
Eotp 在 DSI 规范版本 V1.0 以及更早版本是不支持的,只有符合 DSI V1.0 之后的较新规范版本的设备必须支持 Eotp 的生成和检测,RK3588/RK3576 DSI 版本是 V2.0,为了确保与早期设备的互操作性,主机应该能够启用和禁用生成和检测手段。总之,是否启用 Eotp 取决于屏端是否支持。
Eotp 是一个短包用于指示数据链路上高速传输的结束。Eotp 主要作用是增强系统高速传输通信的稳健性,出于这个目的,DSI 不需要在 LP 模式发送 Eotp。
Eotp 不同于其他 DSI 包,它有固定的格式:
- Data Type = DI [5:0] = 0b001000
- Virtual Channel = DI [7:6] = 0b00
- Payload Data [15:0] = 0x0F0F
- ECC [7:0] = 0x01
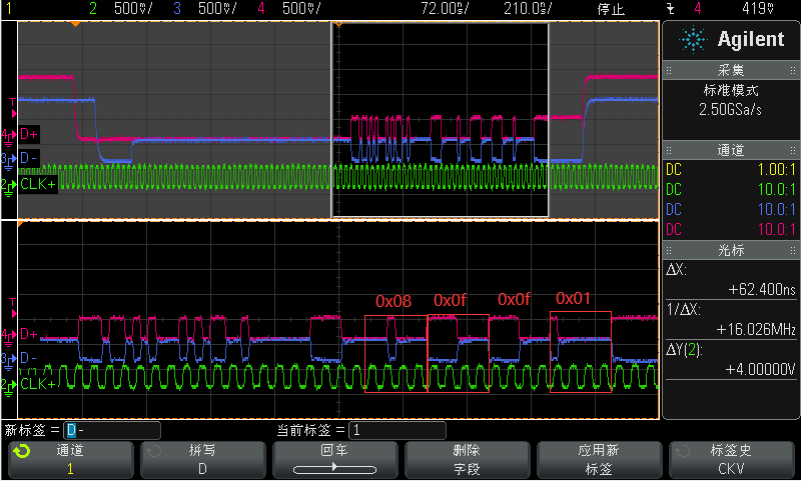
将 MIPI_DSI_MODE_EOT_PACKET 追加到 dsi,flags 属性可以开关 Soc MIPI DSI TX 在高速模式发送 Eotp。
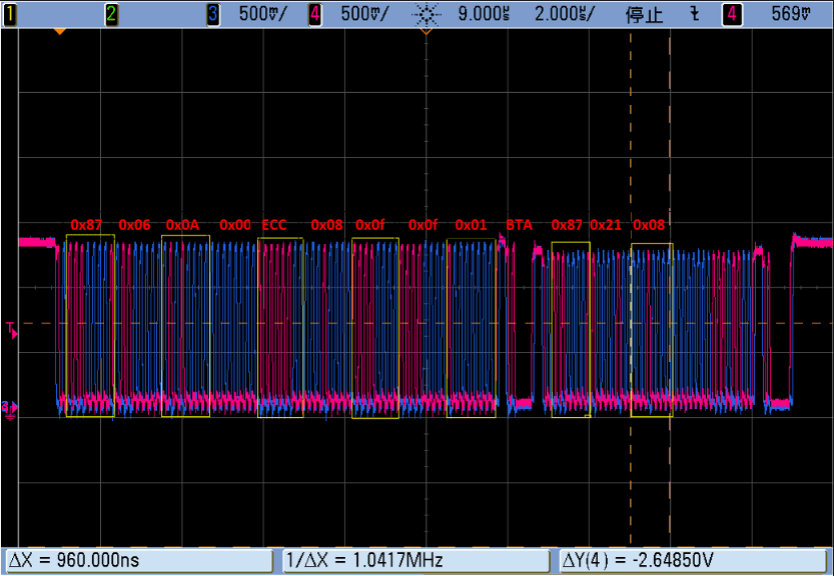
如下是在 HSDT 模式下捕获 Eotp 波形:
8.2.3.3 BLANK_HS_EN
在数据通道,一般存在一行会有两个 LP11 消隐,如下图:
但往往有些显示模组或者外接 MIPI 转接芯片,不支持在 Hblank 阶段有两个 LP-11, 可以将 BLK_HFP_HS_EN 或 BLK_HBP_HS_EN 追加到 dsi,flags 属性,使 HFP 或 HBP 以高速的形式存在。
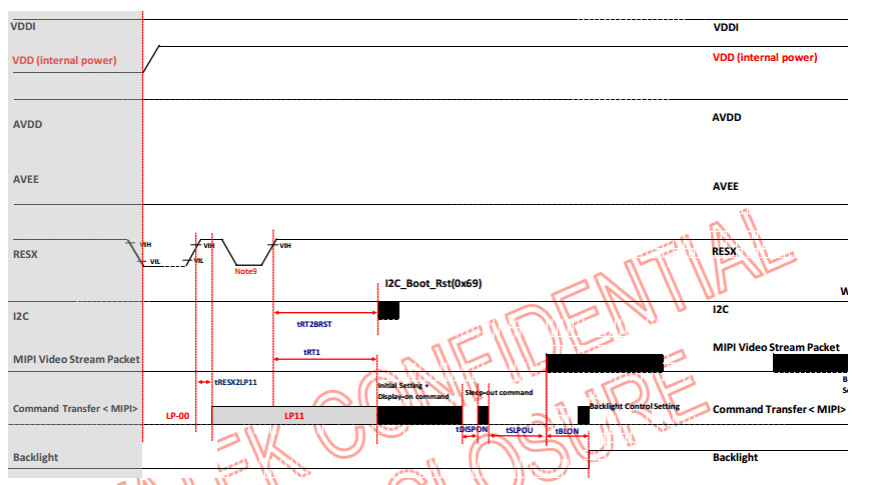
8.2.4 屏上电时序
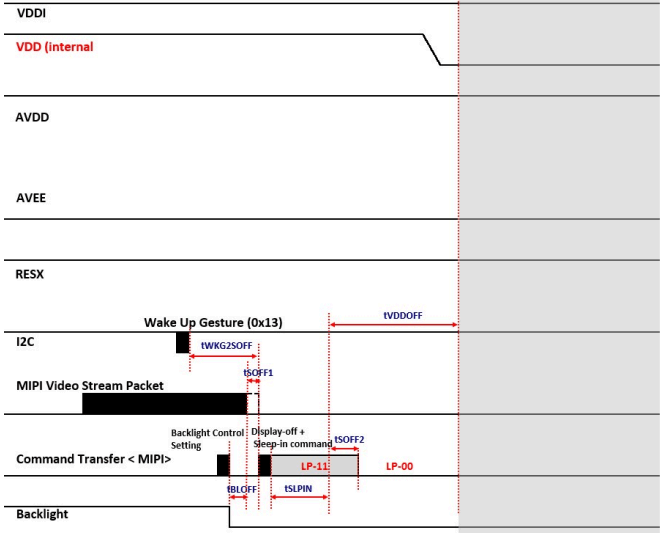
8.2.5 屏下电时序
8.2.6 初始化序列常见数据类型
| data type | description | packet size |
|---|---|---|
| 0x03 | Generic Short WRITE, no parameters | short |
| 0x13 | Generic Short WRITE, 1 parameters | short |
| 0x23 | Generic Short WRITE, 2 parameters | short |
| 0x29 | Generic long WRITE | long |
| 0x05 | DCS Short WRITE, no parameters | short |
| 0x15 | DCS Short WRITE, 1 parameters | short |
| 0x07 | DCS Short WRITE, 1 parameters, DSC EN | short |
| 0x0a | DCS long WRITE, PPS, 128 bytes | long |
9. Timing for DSI video mode
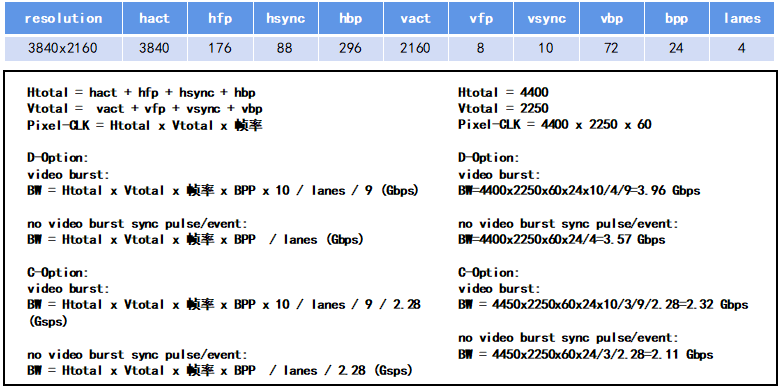
10. Bandwidth
MIPI DSI 驱动中会自动按如下公式根据不同的工作模式进行带宽的计算,当然在调试过程中也许对计算的结果想做些微调可以通过 DTS dsi 节点下 rockchip,lane-rate 属性进行指定,单位可以是 Kbps/Mbps(D-PHY) 或 Ksps/Msps (C-PHY)。如下带宽计算用例中可以发现,4K@60 的分辨率对于 RK3588 MIPI DSI DPHY 不需要 DSC 也完全可以支持,但 CPHY 会稍微超出本身最大带宽。
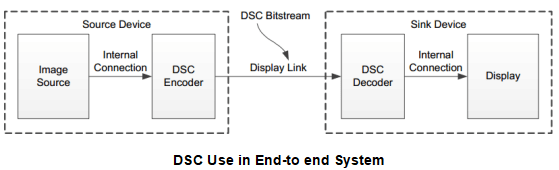
11. DSC
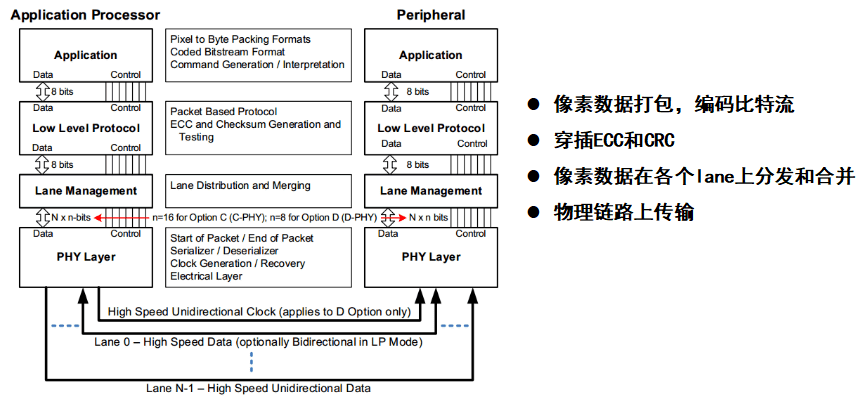
DSC 是 Display Stream Compression 缩写,如下是一个完整的 DSC 系统框图,整个系统为实时工作,未压缩的原始视频像素数据按光栅扫描顺序实时进入编码器并输出比特流,通过显示链路实时传输到解码器,解码器将接收的比特流解码为原始的视频像素数据并送到显示模��块显示。从编码器解码输出的图像和输入到编码器前的图像数据信息格式是一样的。RK3588 具有两个 DSC 编码器,可以有效将高分辨率画质内容以低带宽、低延时传输,从而实现MIPI DSI 可以点更高分辨率的画面。
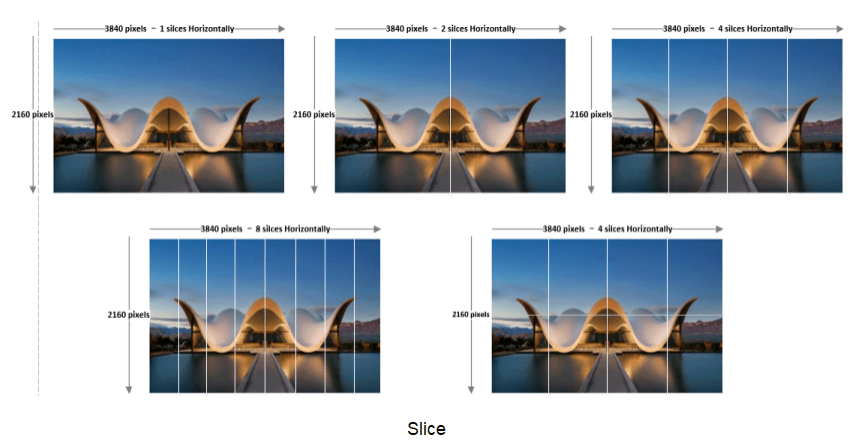
11.1 Slice
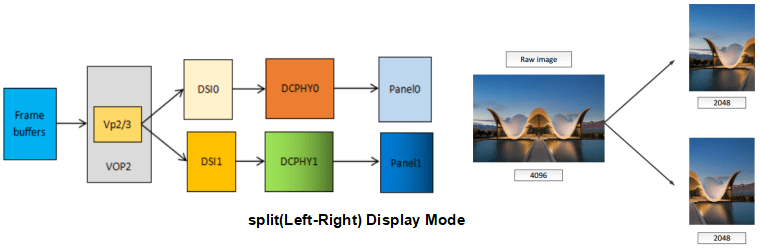
DSC为加速编码过程,并减少经过压缩失真,DSC导入界面(slice),将每一帧的画面加以切割,切割出的截面同时进行编码。DSC可支持的截面数有1、2、4、8个,甚至更多的截面数。需要注意的是单位为slice/line,line是指画面成形时以raster-scan顺序为一行的像素。除不同截面数外,DSC也可以使用不同长宽的截面。如下图右上及右下两张图片,同样都是一行4个截面,但右上的图切割为长条形截面,右下的图则切割成较窄的长方形截面。要使用哪一种长宽的截面取决于Source Device及Sink Device DSC支持的截面数以及DSC压缩或解压缩率。
RK3588 DSC0 最多支持 8 slices,DSC1 最多支持 2 slices。
当实际显示方案中需要确认RK3588 DSC 是否能否支持某款什么分辨率具有多少Slices DSC时,参考如下公式:
- DSC_8K:
active_slice_num * slice_width <= 960 * 8 - DSC_4K:
active_slice_num * slice_width <= 2048 * 2
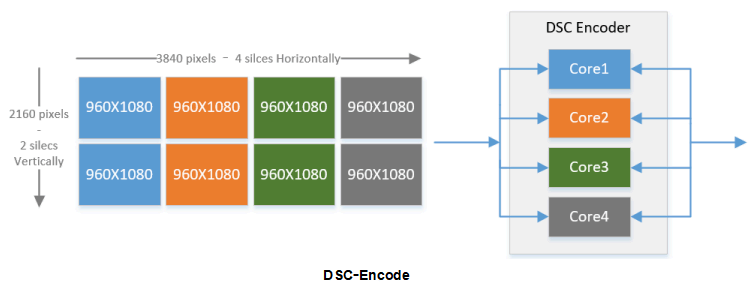
11.2 DSC Encode
在影像数据压缩之前,图像将由Source Device和Sink Device共同协商都能支持的slice数量进行网格均等切割,以3840x2160为例,假如Source Device和Sink Device DSC都能支持8slices,可以在水平方向均等切割4份,垂直方向均等切割2份,假如DSC encoder有4个独立并行处理影像数据压缩的core组成,这该图的左边切割的8个slice可以分成4组同时并行进行压缩,有效将4k画质内容以低带宽、低延时进行传输。
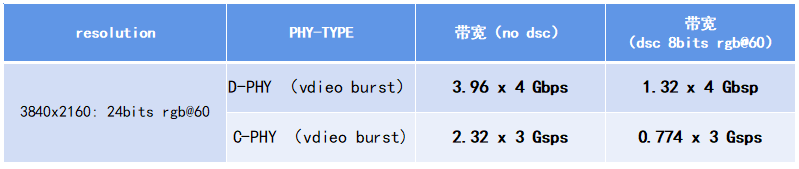
11.3 DSC Bandwidth
以4Kp60的分辨率为例子,启用DSC前后 MIPI D/C-PHY 带宽变化如下,使能DSC后,链路带宽可以降到原始带宽数据的三分之一到二分之一。
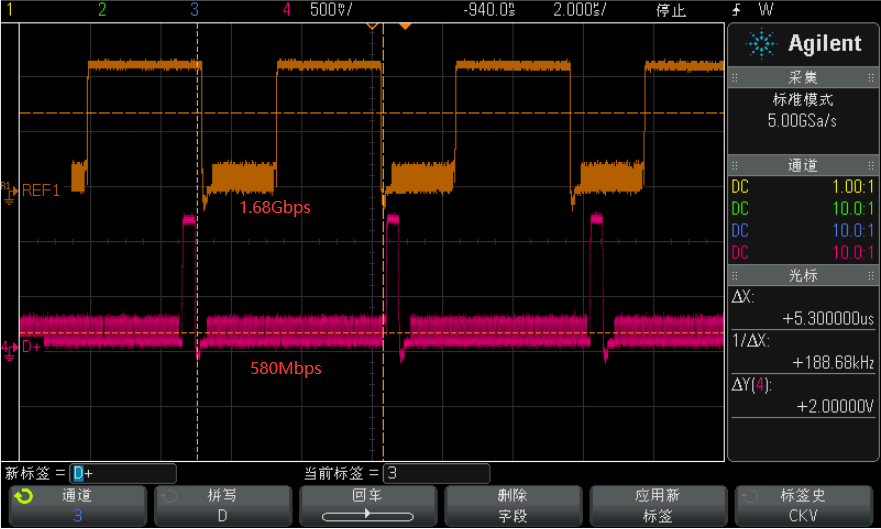
下图为RK3588 MIPI DSI 驱动 1440x3120p60 4lanes with DSC 显示模组时,分别测量以原始带宽和原始带宽的三分之一的信号波形。
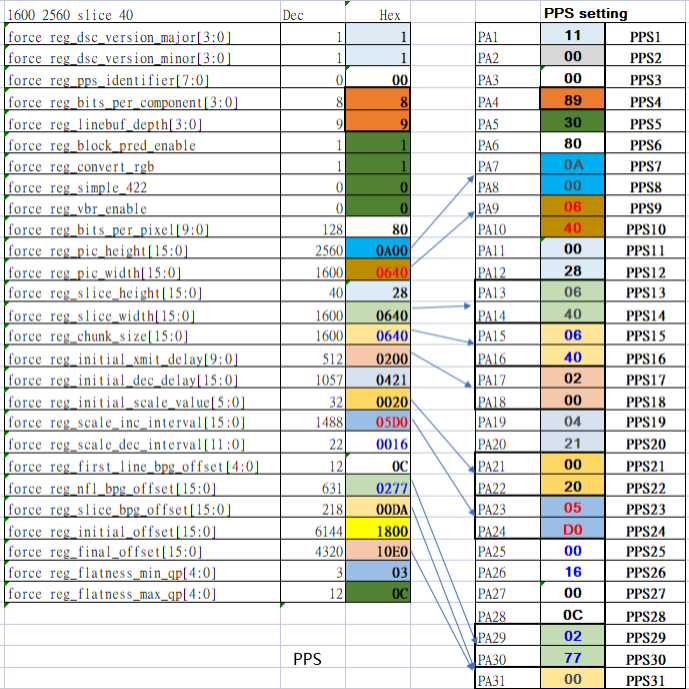
11.4 PPS
PPS 一共有128 bytes 长度,如下表会描述一些 DSC 系统需要的重要信息:
- DSC 版本;
- DSC 压缩编码前的 BPC;
- DSC 压�缩编码后的 BPP;
- DSC 压缩编码前输入原始图像的宽高;
- DSC 压缩编码的 Slice 宽高。
11.5 实例
11.5.1 何时启用 DSC
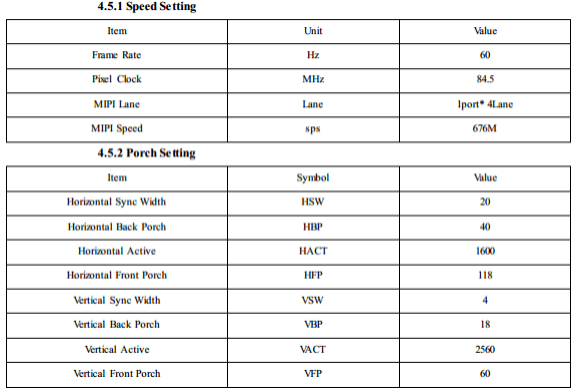
在具体项目 MIPI DSI 相关的显示方案中何时可以启用 DSC。以下面客户提供的显示模组参数为例说明启用 DSC 条件:
- 该模组为一个 DPHY 4 data lanes 接口,最大速率为1Gbps/lane;
- 该模组为 Video Burst mode, 原始带宽:1.866Gbps 24 bits RGB 60帧;
- 该模组支持 DSC 1 Slice
- 该模组目标速率:676Mbps/lane
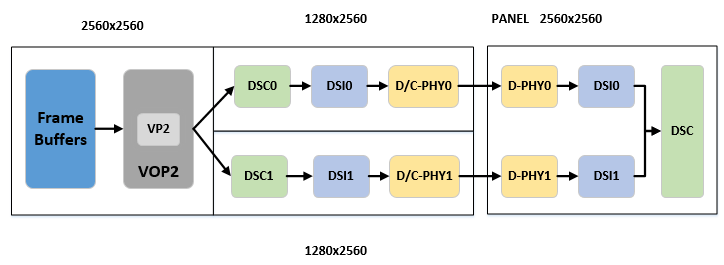
11.5.2 双通道MIPI 如何启用 DSC
如下图为客户方案中点一款带DSC功能 2560x2560p120 双 mipi 显示模组,其实现的显示链路框图如下。
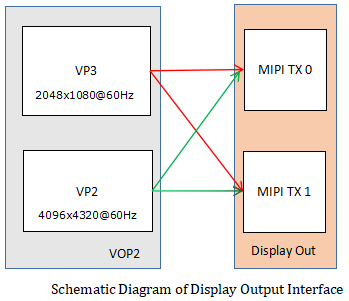
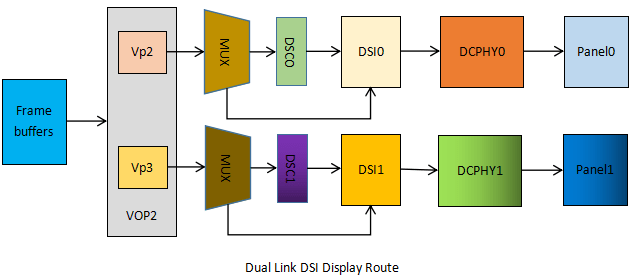
12. Display Route
12.1 MIPI with DSC
12.2 MIPI with DSC Bypass
12.3 DTS 配置
如 DSI0 挂载在 VP3:
&dsi0_in_vp2 {
status = "disabled";
};
&dsi0_in_vp3 {
status = "okay";
};
如 DSI1 挂载 VP2:
&dsi1_in_vp2 {
status = "okay";
};
&dsi1_in_vp3 {
status = "disabled";
};
13. 开机LOGO
13.1 route_dsi0
例如 vp3->dsi0 或 vp3->dsc0->dsi0:
&route_dsi0 {
status = "okay";
connect = <&vp3_out_dsi0>;
};
13.2 route_dsi1
例如 vp2->dsi1 或 vp2->dsc1->dsi1:
&route_dsi1 {
status = "okay";
connect = <&vp2_out_dsi1>;
};
13.3 route_dsi0 && route_dsi1
例如 (vp3->dsi0 或 vp3->dsc0->dsi0) && (vp2->dsi1 或 vp2->dsc1->dsi1):
&route_dsi0 {
status = "okay";
connect = <&vp3_out_dsi0>;
};
&route_dsi1 {
status = "okay";
connect = <&vp2_out_dsi1>;
};
14. DSI HOST
DSI 可以配置成 Manual/Auto-Calculation 模式,驱动默认时配置成 Manual 模式,用户可以选择配置成 Auto-Calculation 模式,该模式有如下特点:
主机被配置为从lPl和PPl接口自动提取所有必要的信息和时序参数,以满足视频模式中的帧时序要求。 Auto-Calculation 模式具有以下优点:
- 无需用户配置一组寄存器
- 简化了配置流程,且控制器不易出现不期望的行为
- 允许IPI帧动态变化,同时控制器适应输出帧的变化
ports
以下实例中 ports 是用来 Dispaly Interface 和 panel 之间进行关联。
详细配置说明参阅如下文档: Documentation/devicetree/bindings/graph.txt
14.1 单 DSI
14.1.1 DSI0
&dsi0 {
status = "okay";
//rockchip,lane-rate = <1000>;
//auto-calculation-mode;
//disable-hold-mode;
//support-psr;
dsi0_panel: panel@0 {
status = "okay";
compatible = "simple-panel-dsi";
...
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
panel_in_dsi: endpoint {
remote-endpoint = <&dsi_out_panel>;
};
};
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@1 {
reg = <1>;
dsi_out_panel: endpoint {
remote-endpoint = <&panel_in_dsi>;
};
};
};
};
&mipi_dcphy0 {
status = "okay";
};
14.1.2 DSI1
&dsi1 {
status = "okay";
//rockchip,lane-rate = <1000>;
//auto-calculation-mode;
//disable-hold-mode;
//support-psr;
dsi1_panel: panel@0 {
status = "okay";
compatible = "simple-panel-dsi";
...
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
panel_in_dsi1: endpoint {
remote-endpoint = <&dsi1_out_panel>;
};
};
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@1 {
reg = <1>;
dsi1_out_panel: endpoint {
remote-endpoint = <&panel_in_dsi1>;
};
};
};
};
&mipi_dcphy1 {
status = "okay";
};
14.2 双通道 DSI
MODE1:
 MODE2:
MODE2:
双通道的配置注意如下标红属性:
rockchip,dual-channel = <&dsi1>
dsi,lanes = <8>;//DPHY 屏, CPHY 屏值改成 6
&dsi0 {
status = "okay";
rockchip,dual-channel = <&dsi1>;
//auto-calculation-mode;
//disable-hold-mode;
//support-psr;
dsi0_panel {
status = "okay";
compatible = "simple-panel-dsi";
dsi,lanes = <8>;
...
display-timings {
native-mode = <&timing0>;
timing0: timing0 {
clock-frequency = <260000000>;
hactive = <1440>;
vactive = <2560>;
hfront-porch = <150>;
hsync-len = <30>;
hback-porch = <60>;
vfront-porch = <8>;
vsync-len = <4>;
vback-porch = <4>;
hsync-active = <0>;
vsync-active = <0>;
de-active = <0>;
pixelclk-active = <0>;
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
panel_in_dsi0: endpoint {
remote-endpoint = <&dsi0_out_panel>;
};
};
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@1 {
reg = <1>;
dsi0_out_panel: endpoint {
remote-endpoint = <&panel_in_dsi0>;
};
};
};
};
&dsi1 {
status = "okay";
};
&mipi_dcphy0 {
status = "okay";
};
&mipi_dcphy1 {
status = "okay";
};
14.3 Dual-link DSI
&dsi0 {
status = "okay";
//rockchip,lane-rate = <1000>;
//auto-calculation-mode;
//disable-hold-mode;
//support-psr;
dsi0_panel: panel@0 {
status = "okay";
compatible = "simple-panel-dsi";
...
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
panel_in_dsi: endpoint {
remote-endpoint = <&dsi_out_panel>;
};
};
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@1 {
reg = <1>;
dsi_out_panel: endpoint {
remote-endpoint = <&panel_in_dsi>;
};
};
};
};
&dsi1 {
status = "okay";
//rockchip,lane-rate = <1000>;
//auto-calculation-mode;
//disable-hold-mode;
//support-psr;
dsi1_panel: panel@0 {
status = "okay";
compatible = "simple-panel-dsi";
...
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
panel_in_dsi1: endpoint {
remote-endpoint = <&dsi1_out_panel>;
};
};
};
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@1 {
reg = <1>;
dsi1_out_panel: endpoint {
remote-endpoint = <&panel_in_dsi1>;
};
};
};
};
&mipi_dcphy0 {
status = "okay";
};
&mipi_dcphy1 {
status = "okay";
};
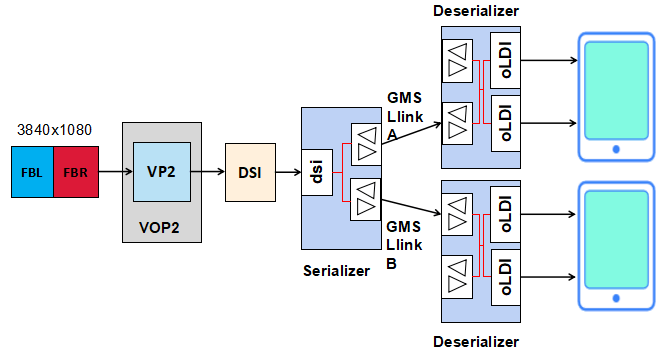
14.4 DSI 应用场景
14.4.1 DSI + SerDer 方案
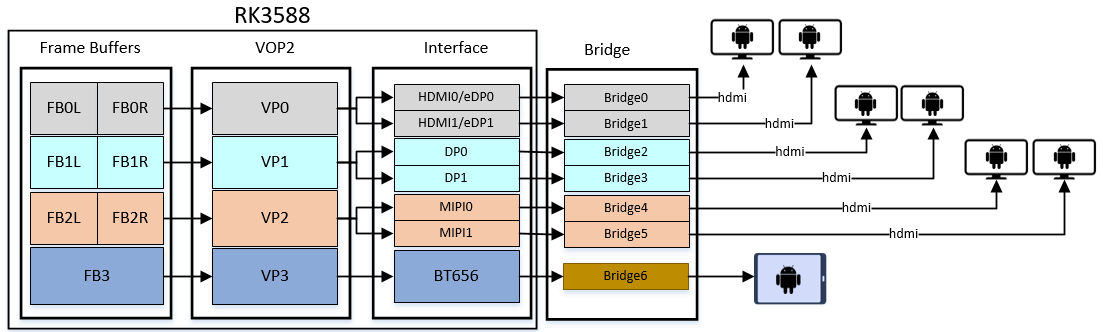
14.4.2 多屏屏接方案
15. DC-PHY
实际应用配置中默认是配置成D-PHY,通过屏端配置介绍可知,通过下述方式可以配置成C-PHY:
dsi0_panel: panel@0 {
...
phy-c-option;
...
};
15.1 D-PHY
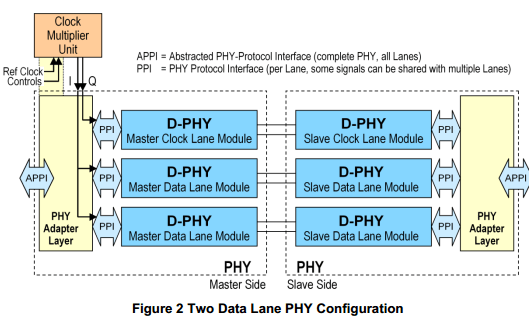
- Up to 4.5 Gbps per lane in D-PHY;
- 一个D-PHY port 最多4lanes,每个lane由两条差分线组成;
- D指的是罗⻢数字500 or "D", D-PHY在推出初期时,数据最⼤速率为1G(DDR),时钟对应的速率为500MHz,⽽现在的D-PHY速率已经不⽌这些,D也就没有什么含义。
15.2 C-PHY
- Up to 2.0 Gsps per trio in C-PHY;
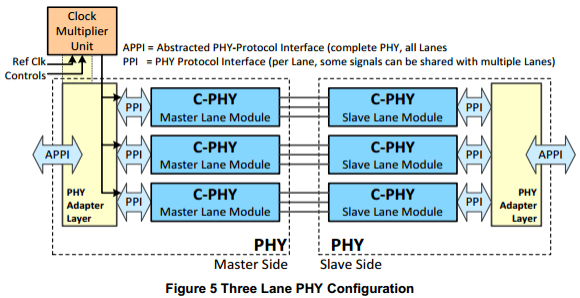
- 一个C-PHY port 最多3lanes,每个lane由 tree-wire-trios 组成;
- C-PHY没有单独的时钟通道,它的时钟隐藏在通信的时序中;
- C指的是Channel-limited, 通道被限制到3,C-PHY总共3条lanes,每条lane使⽤3线传输模式。
16. 动态变帧
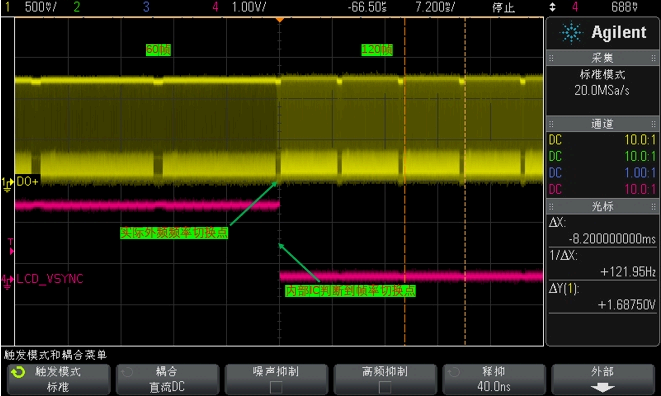
MIPI DSI 可以实现动态帧率切换,比如 120fps <-> 60fps 之间动态无感切换,更多细节参阅《Rockchip_RK3588_Developer_Guide_Vsync_Adjust_CN》相关文档。
17. PSR
当 MIPI DSI 工作在 COMMAND 模式,屏端内置 GRAM,可以在显示系统刷静态帧的时候选择关闭主控的 DSI输出以减少功耗,屏端持续从 GRAM 刷静态帧,当新的一帧有任何显示内容变化时,主控端必须使能并往屏的 GRAM 中刷新帧以更新显示。
18. 协议分析
18.1 DSI Layer Definitions
18.2 D Option
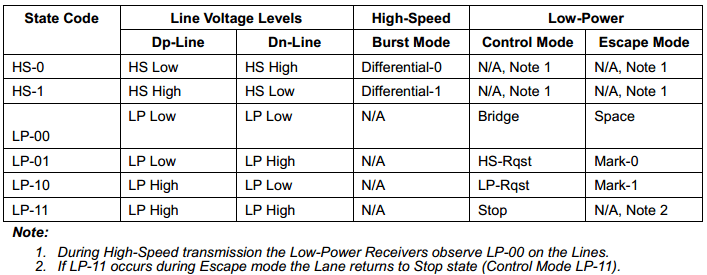
18.2.1 Lane states and line levels
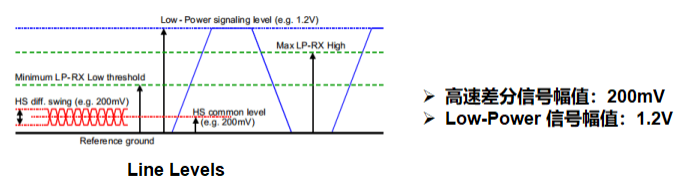
下表罗列在 DPHY Lane 正常操作中可能出现的所有通道状态。
18.2.2 Global Operation Flow Diagram
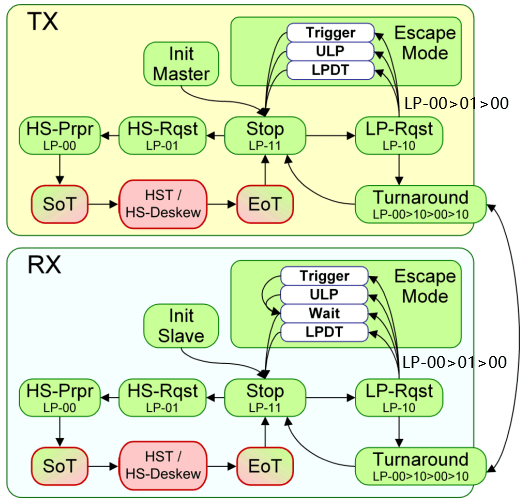
DSI 数据通道可以驱动到如下三种模式:
- Escape Mode (只有 Dp0/Dn0 会操作在该模式);
- Bus Turnaround Request (只有 Dp0/Dn0 会操作在该模式);
- High-Speed Data Transmission。
这三种模式和它们进入对应模式的序列定义如下:

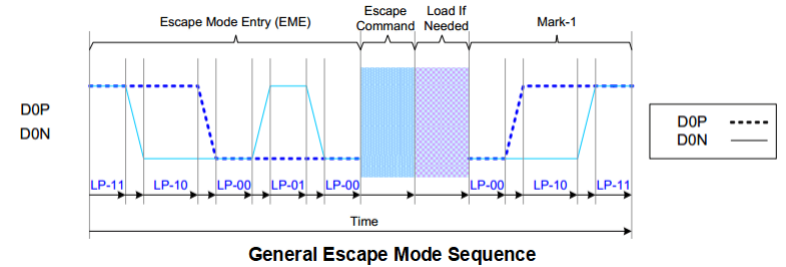
18.2.2.1 Escape Modes
当数据通道处于 LP 模式,数据通道0用于 Escape Mode, 数据通道应通过 LP-11->LP-10->LP-00->LP 01->LP-00 进入 Escape Mode,通过 LP-00->LP-10->LP-11 退出 Escape Mode.
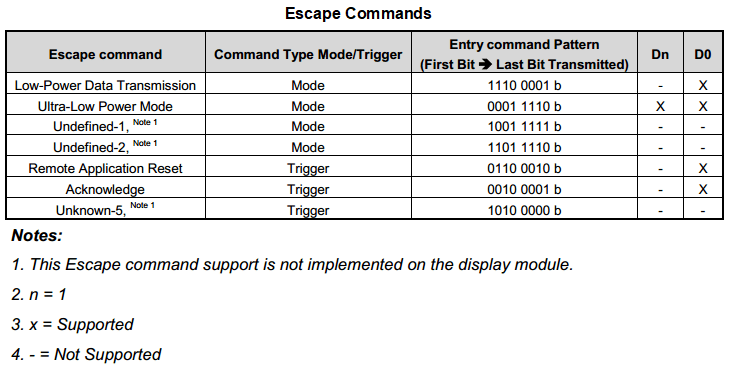
18.2.2.1.1 Escape Commands
一旦数据通道进入 Escape 模式,发送器应该发送 8-bit Escape Commands 指示请求行为,Escape Commands 如下:
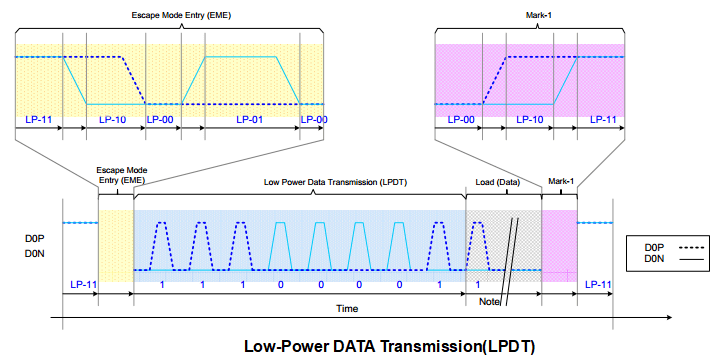
18.2.2.1.2 LPDT
当数据通道进入 Escape 模式且向显示模块发送 Low-Power Data Transmission(LPDT) 序列,Soc 的 MIPI DSI TX 可以通过 LPDT 模式向显示模块发送数据, 一般就是通过这种方式向 MIPI 显示模块下载初始化序列。
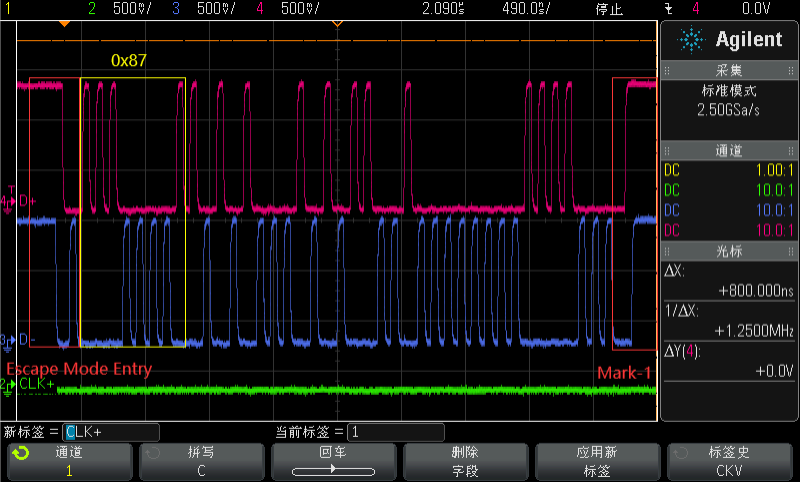
 通过示波器捕获 LPDT 波形如下:
通过示波器捕获 LPDT 波形如下:
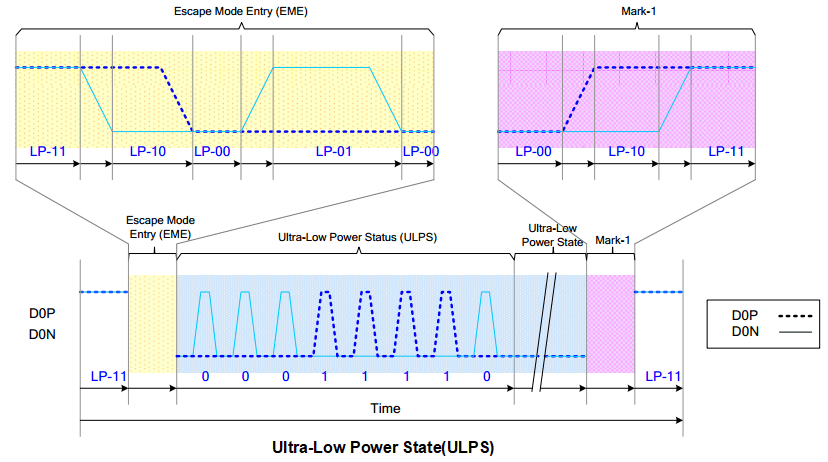
18.2.2.1.3 ULPS
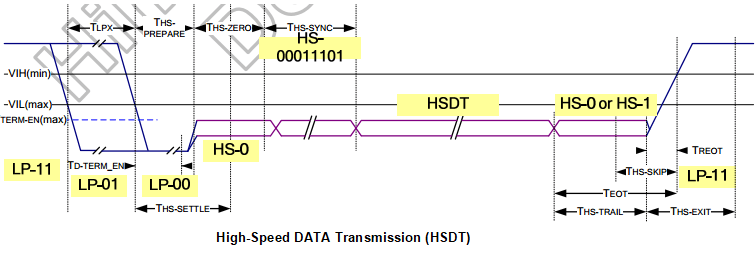
18.2.2.2 HSDT
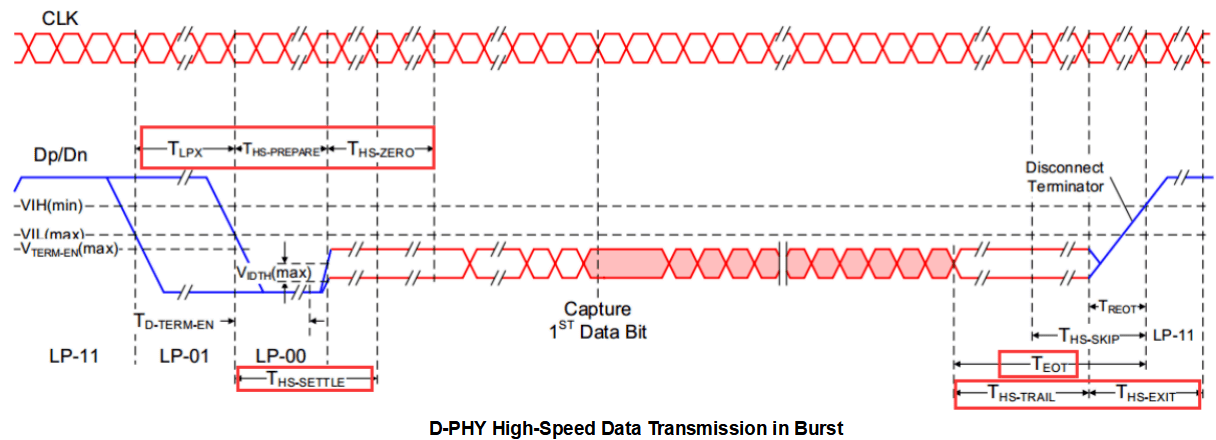
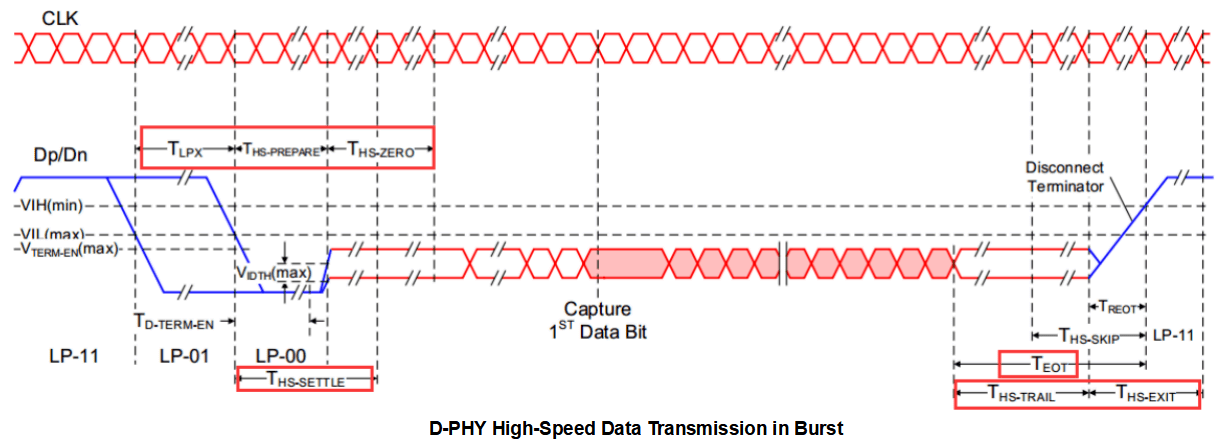
当 DPHY 的时钟通道在高速时钟模式时,显示模块可以进入高速数据传输模式,所��有的数据通道同时进入高速数据传输模式,但可以不同时退出高速模式。数据通道通过如下序列进入高速模式:
- Start: LP-11
- HS-Request: LP-01
- HS-Settle: LP-00 -> HS-0 (RX: Lane Termination Enable)
- Rx Synchronization: SoT(0001_1101)
- End: High-Speed Data Transmission (HSDT) - Ready to receive High-Speed Data Load
数据通道退出高速数据传输模式流程:在最后一个有效负载数据之后立即切换差分状态位并保持该状态一段时间 Ths-trail。
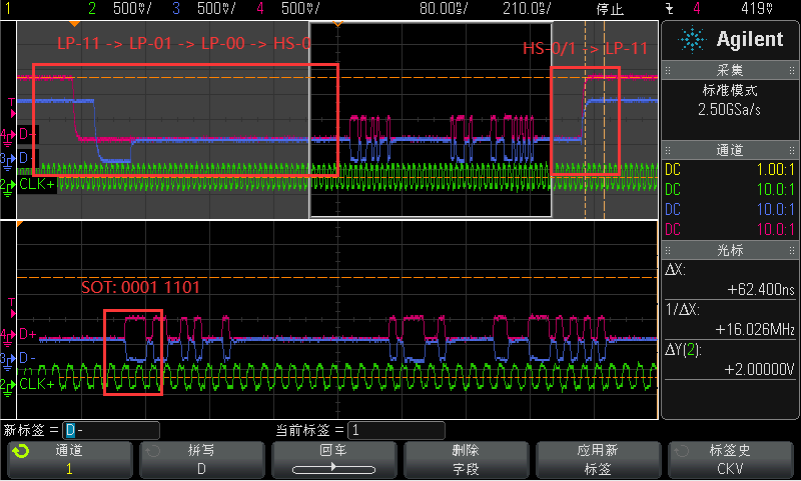
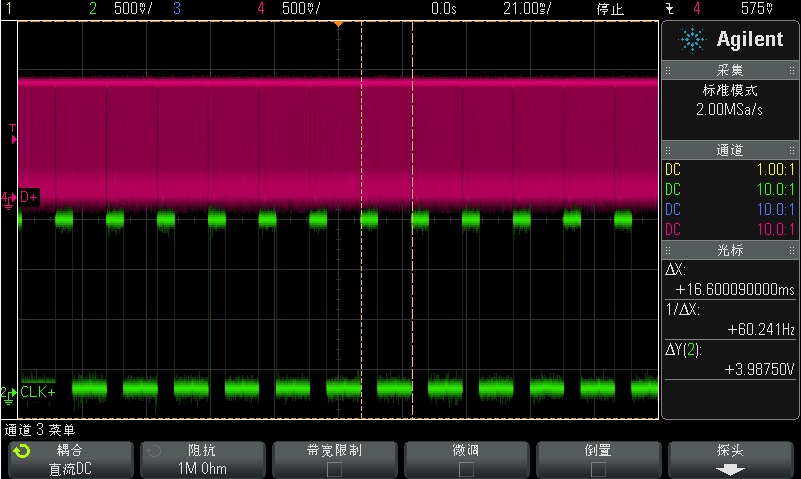
通过示波器捕获 HSDT 波形如下:
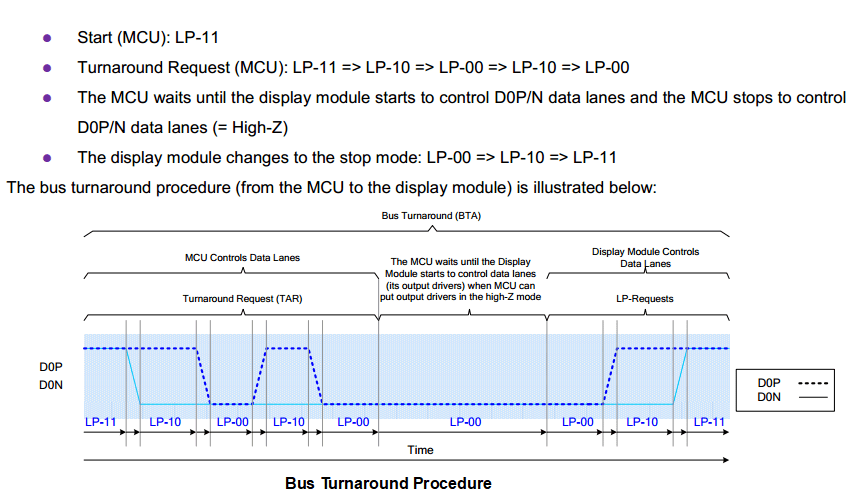
18.2.2.3 BTA
当需要从显示模块获取信息时,Soc DPHY 的第一数据通道可以通过执行总线翻转步骤。操作步骤如下:
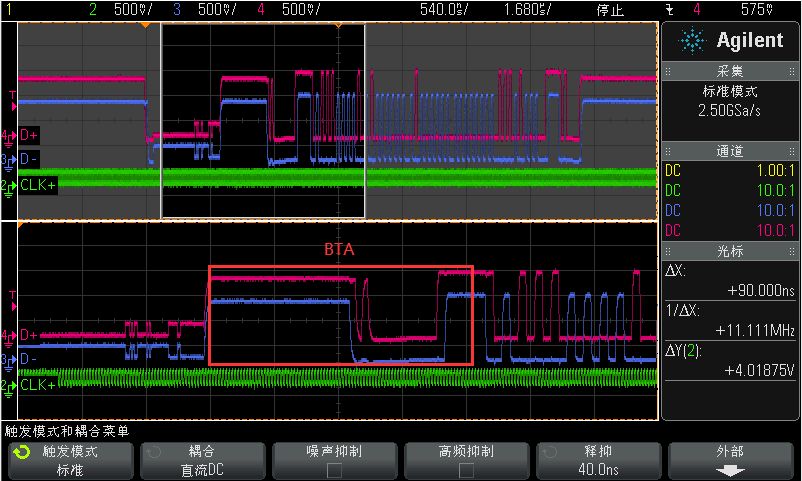
通过示波器在 HSDT 时向显示模块回读并捕获 BTA 波形如下:
18.2.3 Endian Policy
无论是在 LP 和 HS 数据传输模式,数��据都是以长包和短包形式打包并传输给显示模块。
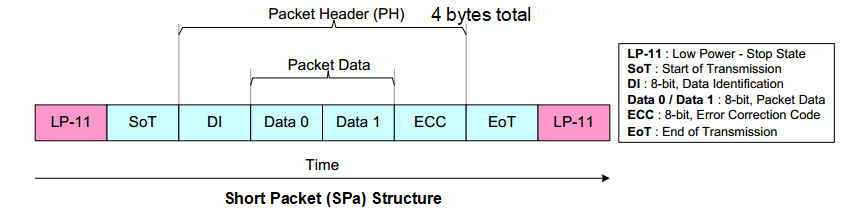
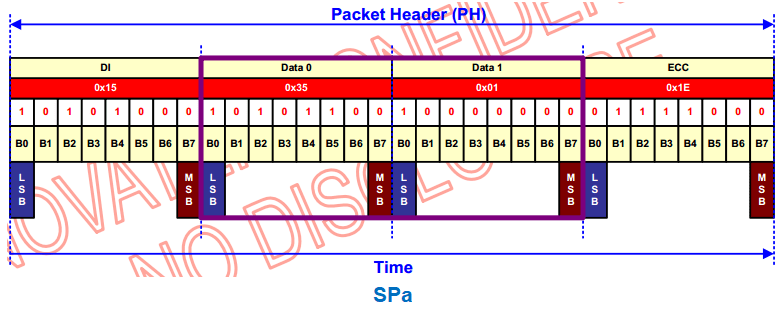
18.2.3.1 SPa
Example:
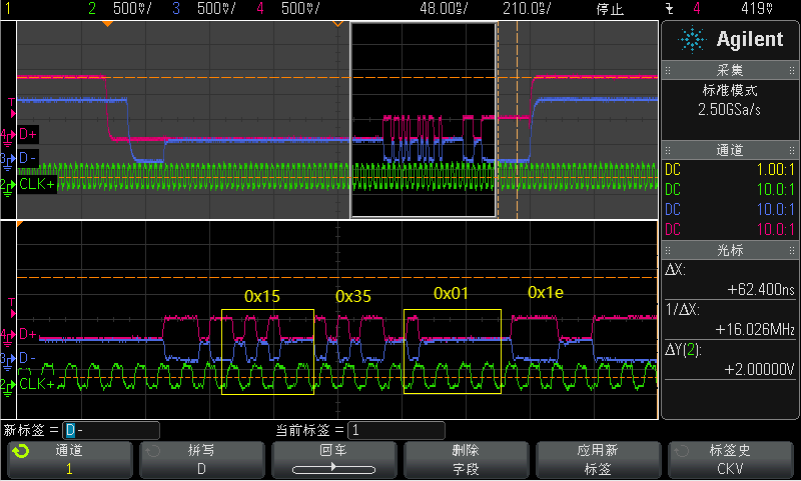
18.2.3.1.1 LPDT-SPa
通过示波器在 LPDT 时向显示模块发送如上 SPa 并捕获波形如下:
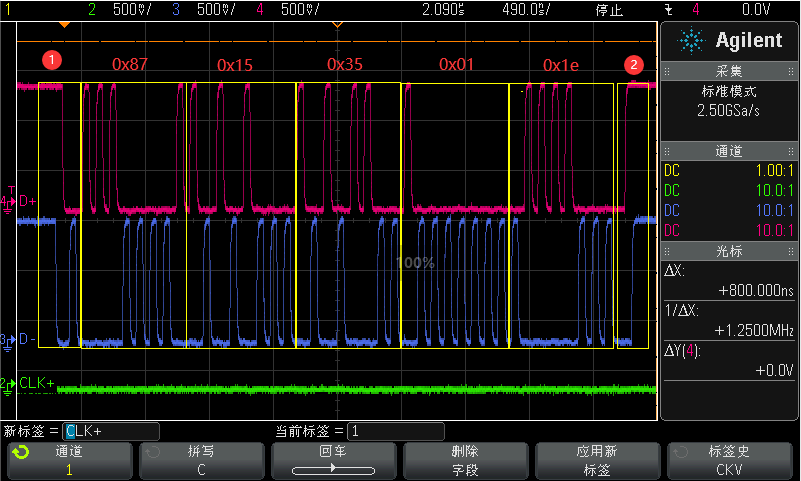
18.2.3.1.2 HSDT-SPa
通过示波器在 HSDT 时向显示模块发送如上 SPa 并捕获波形如下:
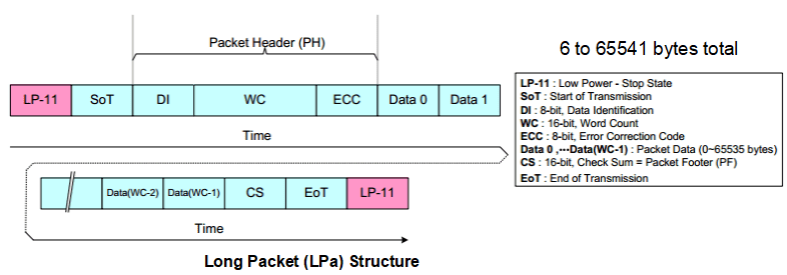
18.2.3.2 LPa
 Example:
Example:
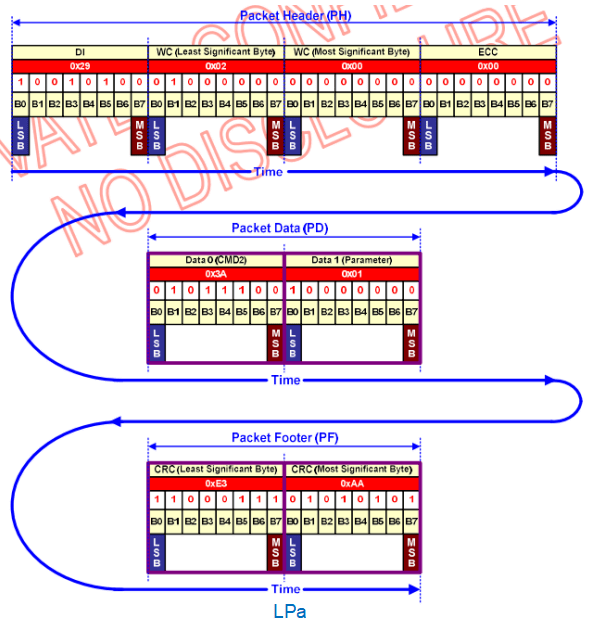
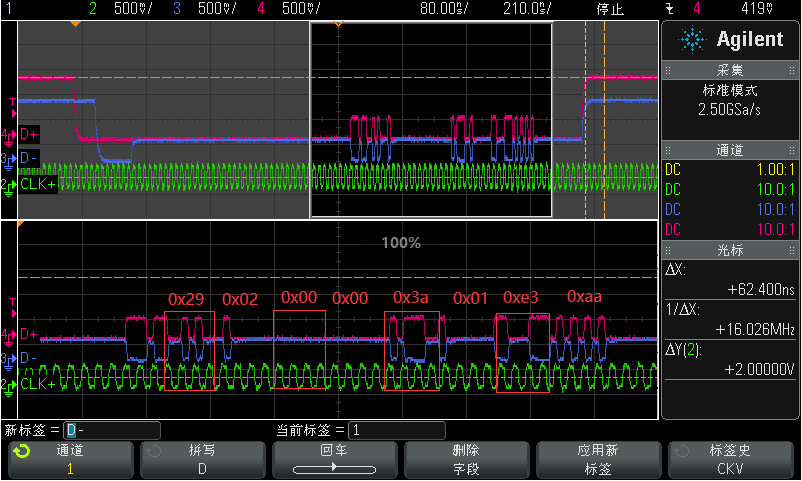
18.2.3.2.1 LPDT-LPa
通过示波器在 LPDT 时向显示模块发送如上 LPa 并捕获波形如下:
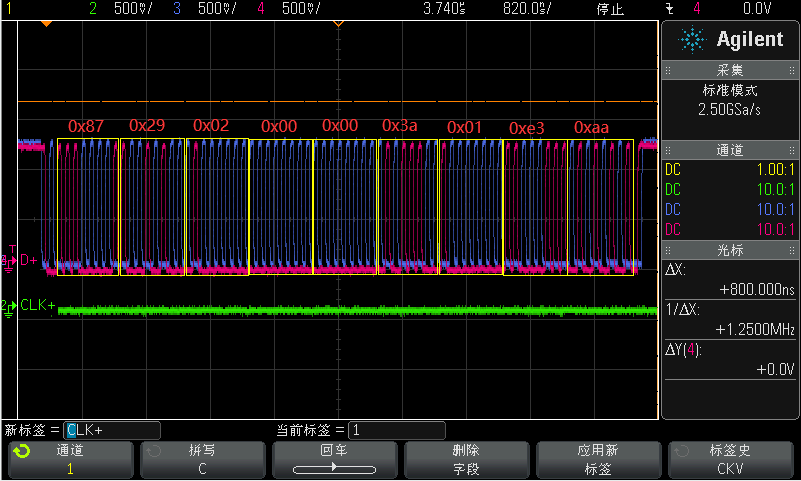
18.2.3.2.2 HSDT-LPa
通过示波器在 HSDT 时向显示模块发送如上 LPa 并捕获波形如下:
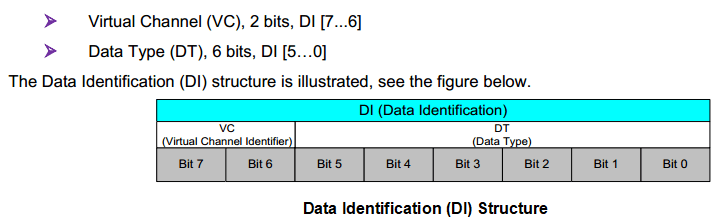
18.2.3.3 DI
如上 SPa 和 LPa 中都有一个 Data Identification (DI), 一个包是长短包就是由 DI 决定,DI 是包头的一部分,由两个部分组成:
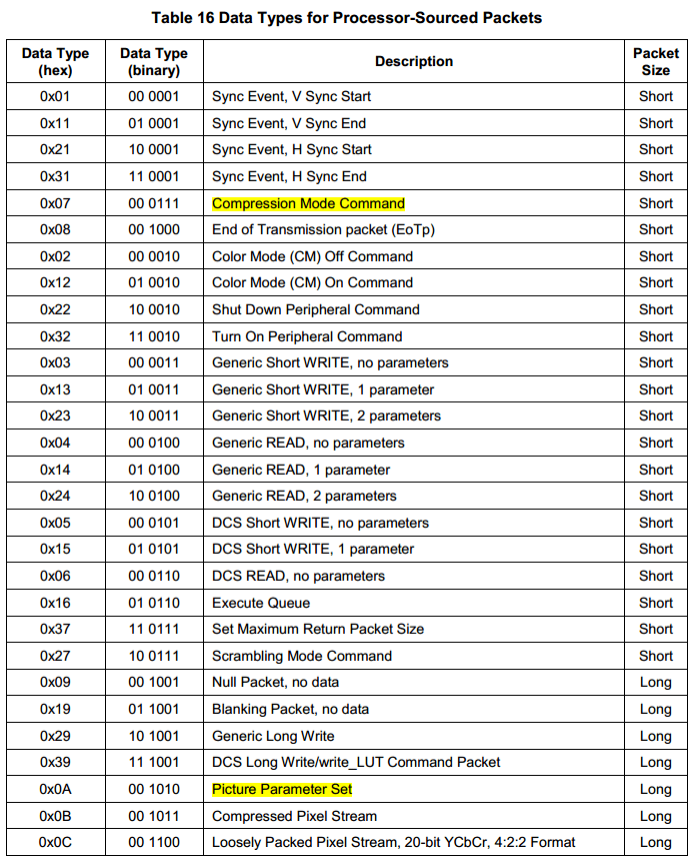
MIPI 协议中目前定义的绝大部分数据类型如下:
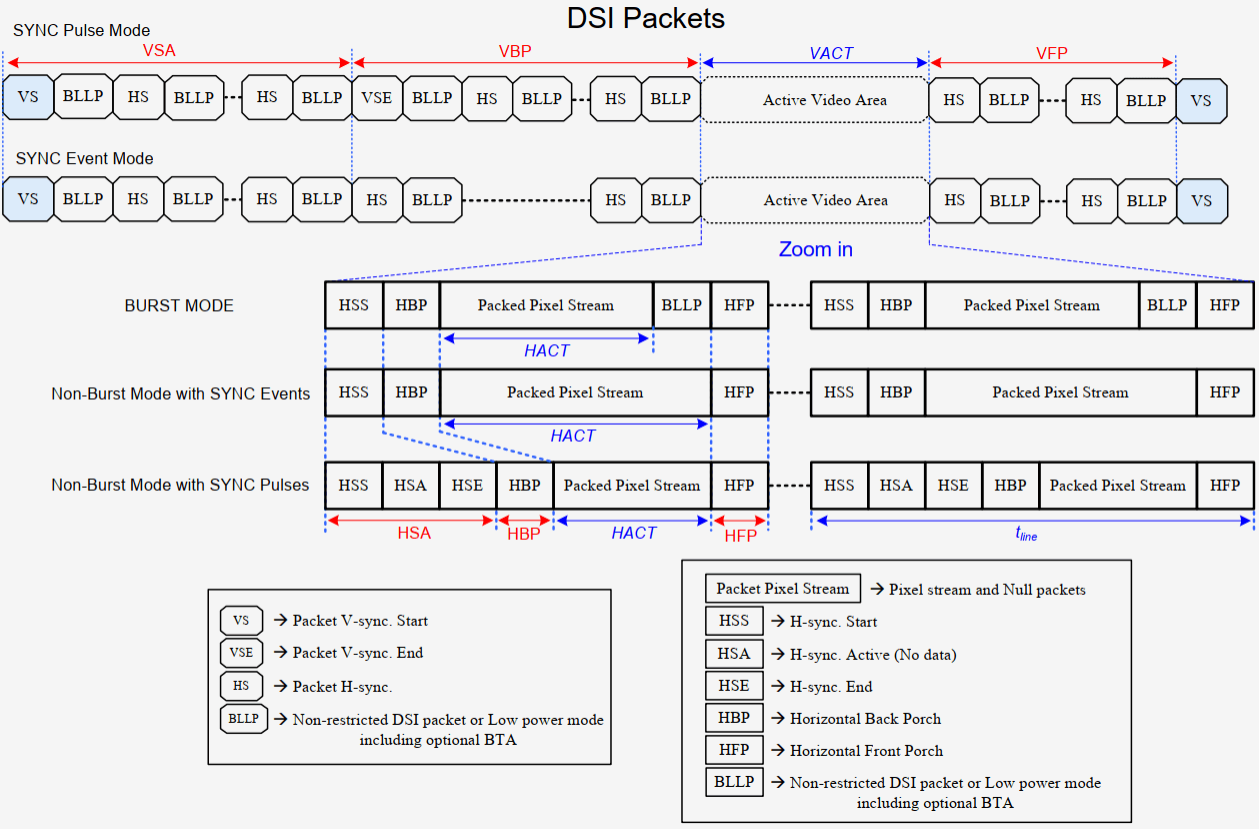
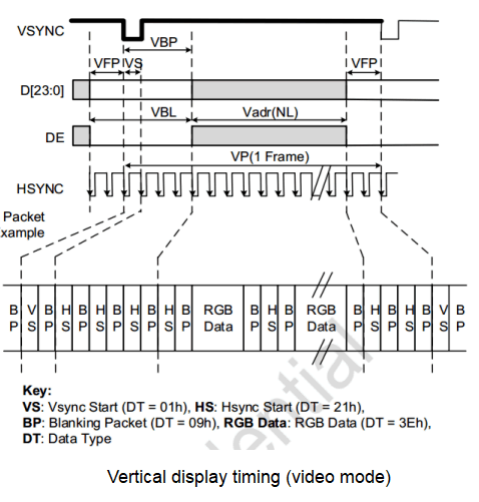
18.2.4 Video Mode Interface Timing
18.2.4.1 Vertical Display Timing (Video mode)
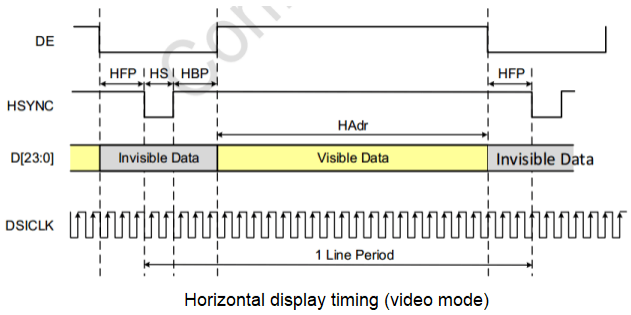
18.2.4.2 Horizontal Display Timing (Video mode)
18.2.4.3 Non-Burst Mode with Sync Pulses
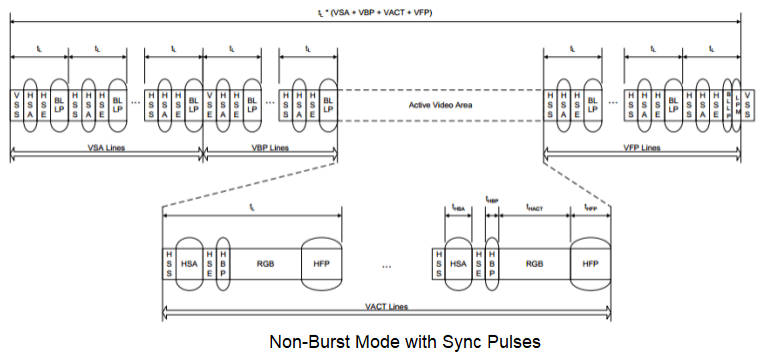 通过示波器捕获 Non Burst Sync Pulse 波形如下:
通过示波器捕获 Non Burst Sync Pulse 波形如下:

18.2.4.4 Burst Mode
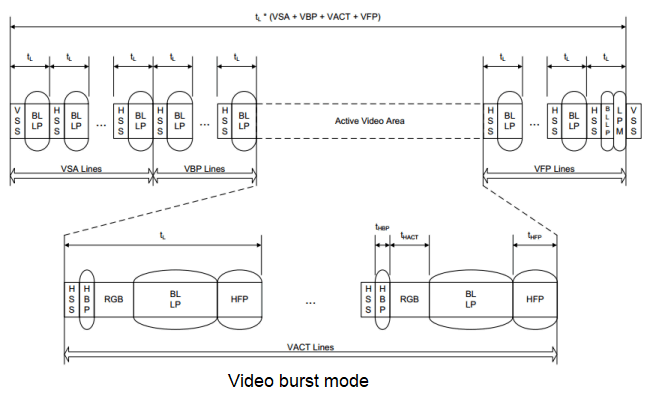 通过示波器捕获 Video Burst 波形如下:
通过示波器捕获 Video Burst 波形如下:

19. 常见问题
19.1 查看VOP timing 和 Connector 信息
console:/ # cat /d/dri/0/summary
Video Port0: DISABLED
Video Port1: DISABLED
Video Port2: DISABLED
Video Port3: ACTIVE
Connector: DSI-2
bus_format[100a]: RGB888_1X24
overlay_mode[0] output_mode[0] color_space[0]
Display mode: 1080x1920p60
clk[132000] real_clk[132000] type[48] flag[a]
H: 1080 1095 1099 1129
V: 1920 1935 1937 1952
Cluster3-win0: ACTIVE
win_id: 6
format: AB24 little-endian (0x34324241) SDR[0] color_space[0]
glb_alpha[0xff]
rotate: xmirror: 0 ymirror: 0 rotate_90: 0 rotate_270: 0
csc: y2r[0] r2y[0] csc mode[0]
zpos: 0
src: pos[0, 0] rect[1080 x 1920]
dst: pos[0, 0] rect[1080 x 1920]
buf[0]: addr: 0x000000000376e000 pitch: 4352 offset: 0
19.2 查看 DSI2 相关 clk tree
当mipi工作在非DSC模式,mipi接口的速率是每个时钟周期4个pixel,相关时钟要满足如下关系:
video_timing_pixel_rate / 4 = mipi_pixel_clock × K = dclk_out × K = dclk_core
当mipi工作在DSC模式,相关时钟要满足如下关系:
mipi_pixel_clock = cds_clk / 2
注意! 默认K = 1, 当mipi配置为双通道显示模式,K = 2。
console:/ # cat /d/clk/clk_summary | grep vop
clk_vop_pmu 0 0 0 24000000 0 0 50000
dclk_vop3 1 2 0 33000000 0 0 50000
dclk_vop1_src 0 1 0 594000000 0 0 50000
dclk_vop1 0 1 0 594000000 0 0 50000
dclk_vop0_src 0 1 0 594000000 0 0 50000
dclk_vop0 0 1 0 594000000 0 0 50000
aclk_vop_low_root 1 1 0 396000000 0 0 50000
hclk_vop_root 2 4 0 198000000 0 0 50000
hclk_vop 1 3 0 198000000 0 0 50000
aclk_vop_root 1 1 0 500000000 0 0 50000
aclk_vop_doby 0 0 0 500000000 0 0 50000
aclk_vop_sub_src 1 1 0 500000000 0 0 50000
aclk_vop 1 4 0 500000000 0 0 50000
pclk_vop_root 3 5 0 100000000 0 0 50000
dclk_vop2_src 1 1 0 148500000 0 0 50000
dclk_vop2 1 2 0 148500000 0 0 50000
console:/ # cat /d/clk/clk_summary | grep dsi
pclk_dsihost1 1 2 0 100000000 0 0 50000
pclk_dsihost0 1 2 0 100000000 0 0 50000
clk_dsihost1 1 2 0 351000000 0 0 50000
clk_dsihost0 1 2 0 351000000 0 0 50000
console:/ # cat /d/clk/clk_summary | grep mipi
mipi1_clk_src 0 0 0 33000000 0 0 50000
mipi1_pixclk 0 0 0 33000000 0 0 50000
mipi0_clk_src 0 0 0 148500000 0 0 50000
mipi0_pixclk 0 0 0 148500000 0 0 50000
clk_usbdpphy_mipidcpphy_ref 5 5 0 24000000 0 0 50000
clk_mipi_camaraout_m4 0 0 0 24000000 0 0 50000
clk_mipi_camaraout_m3 0 0 0 24000000 0 0 50000
clk_mipi_camaraout_m2 0 0 0 24000000 0 0 50000
clk_mipi_camaraout_m0 0 0 0 24000000 0 0 50000
clk_mipi_camaraout_m1 0 0 0 37125000 0 0 50000
pclk_mipi_dcphy1 1 1 0 100000000 0 0 50000
pclk_mipi_dcphy0 1 1 0 100000000 0 0 50000
console:/ #
19.3 如何查看指定 DSI lane 速率
DSI lane 速率的指定有两种,一种是驱动自动计算
dmesg | grep dsi
[ 77.369812] dw-mipi-dsi2 fde20000.dsi: [drm:dw_mipi_dsi2_encoder_enable] final
DSI-Link bandwidth: 879 x 4 Mbps
一种是通过如下属性手动指定:
&dsi0 {
...
rockchip,lane-rate = <1000>;
...
}
19.4 MIPI DSI2 HOST 没有自己color bar 功能,通过如下命令可以让 VOP2 投显 color bar
根据显示路由选择对应的命令:
19.4.1 RK3588
vp0:
io -4 0xfdd90c08 0x1 && io -4 0xfdd90000 0xffffffff
vp1:
io -4 0xfdd90d08 0x1 && io -4 0xfdd90000 0xffffffff
vp2:
io -4 0xfdd90e08 0x1 && io -4 0xfdd90000 0xffffffff
vp3:
io -4 0xfdd90f08 0x1 && io -4 0xfdd90000 0xffffffff
19.4.2 RK3576
vp0:
io -4 0x27d00c08 0x1 && io -4 0x27d00000 0xffffffff
vp1:
io -4 0x27d00d08 0x1 && io -4 0x27d00000 0xffffffff
vp2:
io -4 0x27d00e08 0x1 && io -4 0x27d00000 0xffffffff
19.5 如何判断显示异常的时候,MIPI DSI2 和 panel 是否通信正常
U-Boot
--- a/drivers/video/drm/rockchip_panel.c
+++ b/drivers/video/drm/rockchip_panel.c
@@ -260,6 +260,7 @@ static void panel_simple_prepare(struct rockchip_panel
*panel)
struct rockchip_panel_priv *priv = dev_get_priv(panel->dev);
struct mipi_dsi_device *dsi = dev_get_parent_platdata(panel->dev);
int ret;
+ u8 mode;
if (priv->prepared)
return;
@@ -285,6 +286,8 @@ static void panel_simple_prepare(struct rockchip_panel
*panel)
if (plat->delay.init)
mdelay(plat->delay.init);
+ mipi_dsi_dcs_get_power_mode(dsi, &mode);
+ printf("===>mode: 0x%x\n", mode);
if (plat->on_cmds) {
if (priv->cmd_type == CMD_TYPE_SPI)
ret = rockchip_panel_send_spi_cmds(panel->state,
@@ -298,6 +301,8 @@ static void panel_simple_prepare(struct rockchip_panel
*panel)
printf("failed to send on cmds: %d\n", ret);
}
+ mipi_dsi_dcs_get_power_mode(dsi, &mode);
+ printf("===>mode: 0x%x\n", mode);
priv->prepared = true;
}
Kernel
--- a/drivers/gpu/drm/panel/panel-simple.c
+++ b/drivers/gpu/drm/panel/panel-simple.c
@@ -506,6 +506,7 @@ static int panel_simple_prepare(struct drm_panel *panel)
unsigned int delay;
int err;
int hpd_asserted;
+ u8 mode;
if (p->prepared)
return 0;
@@ -554,6 +555,8 @@ static int panel_simple_prepare(struct drm_panel *panel)
}
}
+ mipi_dsi_dcs_get_power_mode(p->dsi, &mode);
+ printk("===>mode: 0x%x\n", mode);
if (p->desc->init_seq)
if (p->dsi)
panel_simple_xfer_dsi_cmd_seq(p, p->desc->init_seq);
@@ -561,6 +564,9 @@ static int panel_simple_prepare(struct drm_panel *panel)
if (p->desc->delay.init)
msleep(p->desc->delay.init);
+ mipi_dsi_dcs_get_power_mode(p->dsi, &mode);
+ printk("===>mode: 0x%x\n", mode);
+
p->prepared = true;
return 0;
通信正常会有如下打印,否则排查屏端时序确保屏是否就绪:
===> mode: 0x8
===> mode: 0x9c
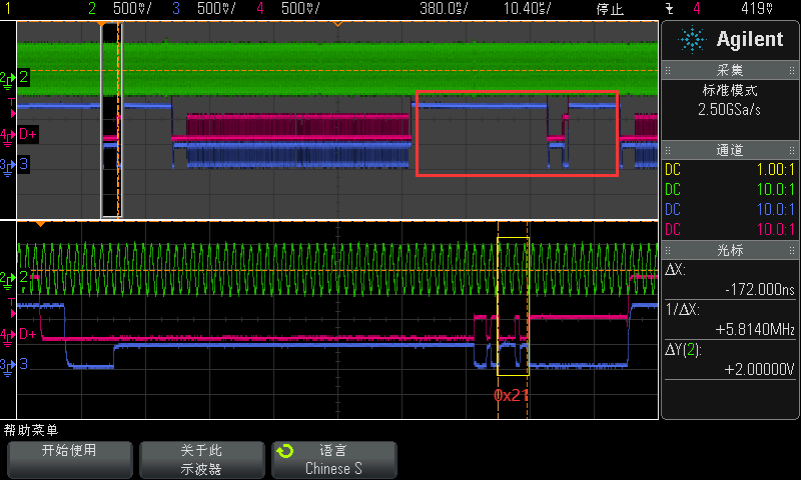
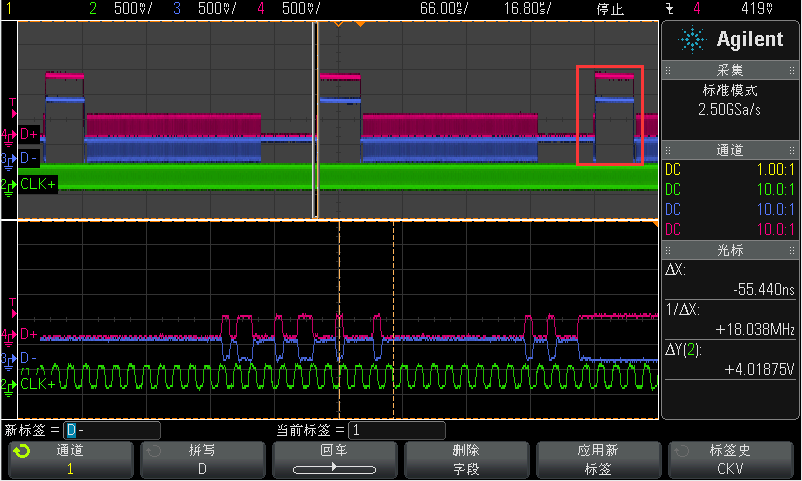
19.5.1 get_power_mode 两种回读波形
19.5.1.1 屏端正常返回0x08(未下发0x11、0x29)波形如下
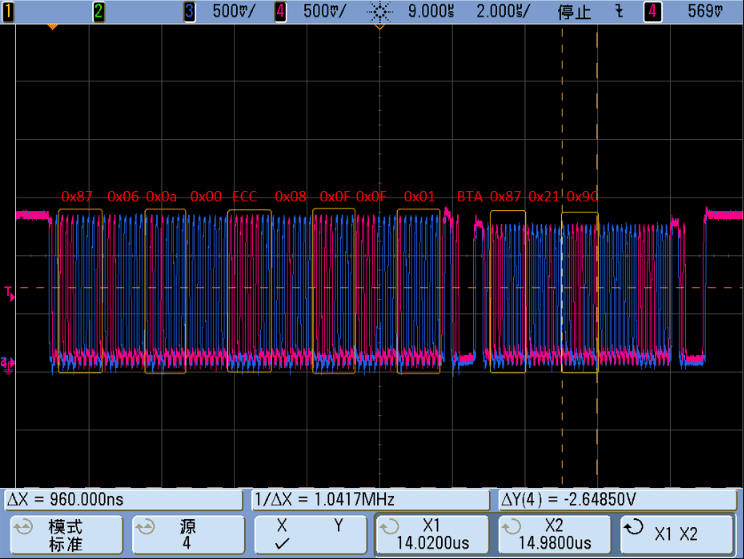
19.5.1.2 屏端正常返回0x9c(已下发0x11、0x29)波形如下
19.6 drm 驱动没有bind起来
通过如下命令,查看是否是某个组件 bound 异常,比如 DP 的 PHY 没有使能会导致 DP bound 异常:
/sys/kernel/debug/device_component/display-subsystem <
master name status
-------------------------------------------------------------
display-subsystem bound
device name status
-------------------------------------------------------------
fdd90000.vop bound
fde20000.dsi � bound
fde30000.dsi bound
fde50000.dp bound
19.7 backlight驱动probe失败
console:/ # dmesg | grep backlight
[ 3.164274] pwm-backlight: probe of backlight failed with error -16
19.8 Command Mode 显示模组如何配置 TE
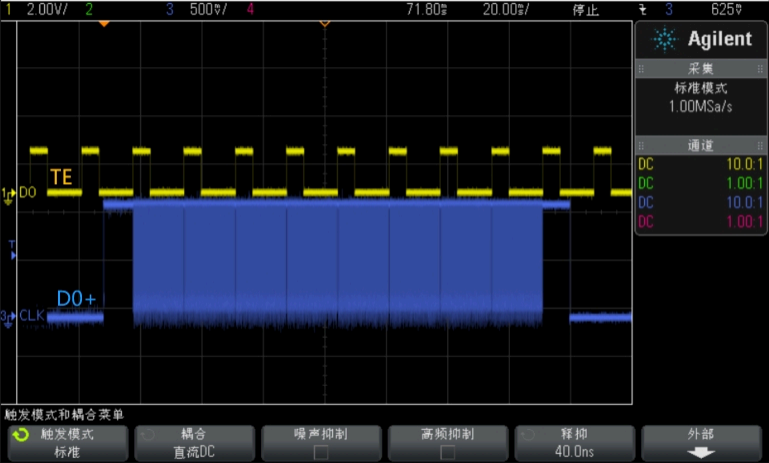
为防止图像显示撕裂,显示控制器刷帧的频率应该和显示模组从GRAM中刷图的频率保持一致。RK3588 和 RK3576 只支持显示模组将TE信号外部反馈的方式。
19.8.1 硬件 TE
MIPI DSI 有专门的 PIN 可以复用成 te。
&dsi0 {
...
/* 显示模组TE信号连接到MIPI_TE0 */
pinctrl-names = "default";
pinctrl-0 = <&mipi_te0>;
...
};
&dsi1 {
...
/* 显示模组TE信号连接到MIPI_TE1,only RK3588 support dsi1 */
pinctrl-names = "default";
pinctrl-0 = <&mipi_te1>;
...
};
19.8.2 软件 TE
有时候硬件 TE 会被复用成其他功能,所以可以利用其他空闲 GPIO 作为输入来向显示系统通知 TE 中断。
&dsi0 {
status = "okay";
te-gpios = <&gpio0 RK_PC4 GPIO_ACTIVE_LOW>;
pinctrl-names = "default";
pinctrl-0 = <&lcd_te_gpio>;
};
下图捕获MIPI DSI发送数据信号场频和显示模组TE信号频率一致波形:
19.9 双通道MIPI切换主从顺序
如果硬件设计将双通道的两个MIPI Ports接反了,可以通过如下配置进行软件纠正:
&dsi0 {
...
rockchip,data-swap;
rockchip,dual-channel = <&dsi1>;
...
};
&dsi1 {
status = "okay";
};
19.10 调试节点
在MIPI DSI信号测试过程中需要对信号进行调整,如下是相关调试节点路径:
dcphy0:
cd /sys/devices/platform/feda0000.phy/
dcphy1:
cd /sys/devices/platform/fedb0000.phy/
19.10.1 Patch
diff --git a/drivers/phy/rockchip/phy-rockchip-samsung-dcphy.c
b/drivers/phy/rockchip/phy-rockchip-samsung-dcphy.c
index 1d5db69ee..c5d11f30c 100644
--- a/drivers/phy/rockchip/phy-rockchip-samsung-dcphy.c
+++ b/drivers/phy/rockchip/phy-rockchip-samsung-dcphy.c
@@ -142,6 +142,25 @@
#define T_TA_GET(x) UPDATE(x, 7, 4)
#define T_TA_GO(x) UPDATE(x, 3, 0)
+
+#define REG_400M_MASK GENMASK(6, 4)
+#define REG_400M(x) UPDATE(x, 6, 4)
+#define BIAS_CON4 0x0010
+#define I_MUX_SEL_MASK GENMASK(6, 5)
+#define I_MUX_SEL(x) UPDATE(x, 6, 5)
+#define CAP_PEAKING_MASK GENMASK(14, 12)
+#define CAP_PEAKING(x) UPDATE(x, 14, 12)
+#define RES_UP_MASK GENMASK(7, 4)
+#define RES_UP(x) UPDATE(x, 7, 4)
+#define RES_DN_MASK GENMASK(3, 0)
+#define RES_DN(x) UPDATE(x, 3, 0)
+#define T_HS_ZERO_MASK GENMASK(15, 8)
+#define T_HS_PREPARE_MASK GENMASK(7, 0)
+#define T_HS_EXIT_MASK GENMASK(15, 8)
+#define T_HS_TRAIL_MASK GENMASK(7, 0)
+#define T_TA_GET_MASK GENMASK(7, 4)
+#define T_TA_GO_MASK GENMASK(3, 0)
+
/* MIPI_CDPHY_GRF registers */
#define MIPI_DCPHY_GRF_CON0 0x0000
#define S_CPHY_MODE HIWORD_UPDATE(1, 3, 3)
@@ -1194,6 +1213,421 @@ struct samsung_mipi_cphy_timing
samsung_mipi_cphy_timing_table[] = {
{ 80, 1, 50, 25, 2, 0, 2 },
};
+static ssize_t
+reg_400m_show(struct device *device, struct device_attribute *attr, char *buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int level;
+
+ regmap_read(samsung->regmap, BIAS_CON2, &val);
+ level = (val & REG_400M_MASK) >> 4;
+
+ return sprintf(buf, "%d\n", level);
+
+}
+
+static ssize_t
+reg_400m_store(struct device *device, struct device_attribute *attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+
+ if (val > 7)
+ val = 7;
+
+ regmap_update_bits(samsung->regmap, BIAS_CON2, REG_400M_MASK, REG_400M(val));
+
+ return count;
+}
+static DEVICE_ATTR_RW(reg_400m);
+
+static ssize_t
+cap_peaking_show(struct device *device, struct device_attribute *attr, char
*buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int level;
+
+ regmap_read(samsung->regmap, COMBO_MD0_ANA_CON0, &val);
+ level = (val & CAP_PEAKING_MASK) >> 12;
+
+ return sprintf(buf, "%d\n", level);
+
+}
+
+static ssize_t
+cap_peaking_store(struct device *device, struct device_attribute *attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+
+ if (val > 7)
+ val = 7;
+
+ regmap_update_bits(samsung->regmap, DPHY_MC_ANA_CON0, CAP_PEAKING_MASK,
CAP_PEAKING(val));
+ regmap_update_bits(samsung->regmap, COMBO_MD0_ANA_CON0, CAP_PEAKING_MASK,
CAP_PEAKING(val));
+ regmap_update_bits(samsung->regmap, COMBO_MD1_ANA_CON0, CAP_PEAKING_MASK,
CAP_PEAKING(val));
+ regmap_update_bits(samsung->regmap, COMBO_MD2_ANA_CON0, CAP_PEAKING_MASK,
CAP_PEAKING(val));
+ regmap_update_bits(samsung->regmap, DPHY_MD3_ANA_CON0, CAP_PEAKING_MASK,
CAP_PEAKING(val));
+
+ return count;
+}
+static DEVICE_ATTR_RW(cap_peaking);
+
+static ssize_t
+res_up_show(struct device *device, struct device_attribute *attr, char *buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int level;
+
+ regmap_read(samsung->regmap, COMBO_MD0_ANA_CON0, &val);
+ level = (val & RES_UP_MASK) >> 4;
+
+ return sprintf(buf, "%d\n", level);
+
+}
+
+static ssize_t
+res_up_store(struct device *device, struct device_attribute *attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+
+ if (val > 15)
+ val = 15;
+
+ regmap_update_bits(samsung->regmap, DPHY_MC_ANA_CON0, RES_UP_MASK,
RES_UP(val));
+ regmap_update_bits(samsung->regmap, COMBO_MD0_ANA_CON0, RES_UP_MASK,
RES_UP(val));
+ regmap_update_bits(samsung->regmap, COMBO_MD1_ANA_CON0, RES_UP_MASK,
RES_UP(val));
+ regmap_update_bits(samsung->regmap, COMBO_MD2_ANA_CON0, RES_UP_MASK,
RES_UP(val));
+ regmap_update_bits(samsung->regmap, DPHY_MD3_ANA_CON0, RES_UP_MASK,
RES_UP(val));
+
+ return count;
+}
+static DEVICE_ATTR_RW(res_up);
+
+static ssize_t
+res_dn_show(struct device *device, struct device_attribute *attr, char *buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int level;
+
+ regmap_read(samsung->regmap, COMBO_MD0_ANA_CON0, &val);
+ level = (val & RES_DN_MASK);
+
+ return sprintf(buf, "%d\n", level);
+
+}
+
+static ssize_t
+res_dn_store(struct device *device, struct device_attribute *attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+
+ if (val > 15)
+ val = 15;
+
+ regmap_update_bits(samsung->regmap, DPHY_MC_ANA_CON0, RES_DN_MASK,
RES_DN(val));
+ regmap_update_bits(samsung->regmap, COMBO_MD0_ANA_CON0, RES_DN_MASK,
RES_DN(val));
+ regmap_update_bits(samsung->regmap, COMBO_MD1_ANA_CON0, RES_DN_MASK,
RES_DN(val));
+ regmap_update_bits(samsung->regmap, COMBO_MD2_ANA_CON0, RES_DN_MASK,
RES_DN(val));
+ regmap_update_bits(samsung->regmap, DPHY_MD3_ANA_CON0, RES_DN_MASK,
RES_DN(val));
+
+ return count;
+}
+static DEVICE_ATTR_RW(res_dn);
+
+static ssize_t
+output_voltage_show(struct device *device, struct device_attribute *attr, char
*buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int level;
+
+ regmap_read(samsung->regmap, BIAS_CON4, &val);
+ level = (val & I_MUX_SEL_MASK) >> 5;
+
+ return sprintf(buf, "%d\n", level);
+
+}
+
+static ssize_t
+output_voltage_store(struct device *device, struct device_attribute *attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+
+ if (val > 3)
+ val = 3;
+
+ regmap_update_bits(samsung->regmap, BIAS_CON4,
+ I_MUX_SEL_MASK, I_MUX_SEL(val));
+
+ return count;
+}
+static DEVICE_ATTR_RW(output_voltage);
+
+static ssize_t
+hs_exit_show(struct device *device, struct device_attribute *attr, char *buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int hs_exit;
+
+ regmap_read(samsung->regmap, COMBO_MD0_TIME_CON2, &val);
+ hs_exit = (val & GENMASK(15, 8)) >> 8;
+
+ return sprintf(buf, "%d\n", hs_exit);
+
+}
+
+static ssize_t hs_exit_store(struct device *device, struct device_attribute
*attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+ unsigned long hs_exit;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+ hs_exit = T_HS_EXIT(val);
+ regmap_update_bits(samsung->regmap, COMBO_MD0_TIME_CON2, T_HS_EXIT_MASK,
hs_exit);
+ regmap_update_bits(samsung->regmap, COMBO_MD1_TIME_CON2, T_HS_EXIT_MASK,
hs_exit);
+ regmap_update_bits(samsung->regmap, COMBO_MD2_TIME_CON2, T_HS_EXIT_MASK,
hs_exit);
+
+ if (!samsung->c_option) {
+ regmap_update_bits(samsung->regmap, DPHY_MC_TIME_CON2, T_HS_EXIT_MASK,
hs_exit);
+ regmap_update_bits(samsung->regmap, DPHY_MD3_TIME_CON2, T_HS_EXIT_MASK,
hs_exit);
+ }
+
+ return count;
+}
+static DEVICE_ATTR_RW(hs_exit);
+
+static ssize_t
+hs_trail_or_post_3_show(struct device *device, struct device_attribute *attr,
char *buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int hs_trail;
+
+ regmap_read(samsung->regmap, COMBO_MD0_TIME_CON2, &val);
+ hs_trail = val & GENMASK(7, 0);
+
+ return sprintf(buf, "%d\n", hs_trail);
+
+}
+
+static ssize_t hs_trail_or_post_3_store(struct device *device, struct
device_attribute *attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+ unsigned long hs_trail;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+ hs_trail = T_HS_TRAIL(val);
+ regmap_update_bits(samsung->regmap, COMBO_MD0_TIME_CON2, T_HS_TRAIL_MASK,
hs_trail);
+ regmap_update_bits(samsung->regmap, COMBO_MD1_TIME_CON2, T_HS_TRAIL_MASK,
hs_trail);
+ regmap_update_bits(samsung->regmap, COMBO_MD2_TIME_CON2, T_HS_TRAIL_MASK,
hs_trail);
+
+ if (!samsung->c_option) {
+ regmap_update_bits(samsung->regmap, DPHY_MC_TIME_CON2, T_HS_TRAIL_MASK,
hs_trail);
+ regmap_update_bits(samsung->regmap, DPHY_MD3_TIME_CON2, T_HS_TRAIL_MASK,
hs_trail);
+ }
+
+ return count;
+}
+static DEVICE_ATTR_RW(hs_trail_or_post_3);
+
+static ssize_t
+hs_zero_or_prebegin_3_show(struct device *device, struct device_attribute *attr,
char *buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int hs_zero;
+
+ regmap_read(samsung->regmap, COMBO_MD0_TIME_CON1, &val);
+ hs_zero = (val & GENMASK(15, 8)) >> 8;
+
+ return sprintf(buf, "%d\n", hs_zero);
+
+}
+
+static ssize_t hs_zero_or_prebegin_3_store(struct device *device, struct
device_attribute *attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+ unsigned long hs_zero;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+ hs_zero = T_HS_ZERO(val);
+ regmap_update_bits(samsung->regmap, COMBO_MD0_TIME_CON1,
+ T_HS_ZERO_MASK, hs_zero);
+ regmap_update_bits(samsung->regmap, COMBO_MD1_TIME_CON1,
+ T_HS_ZERO_MASK, hs_zero);
+ regmap_update_bits(samsung->regmap, COMBO_MD2_TIME_CON1,
+ T_HS_ZERO_MASK, hs_zero);
+
+ if (!samsung->c_option) {
+ regmap_update_bits(samsung->regmap, DPHY_MC_TIME_CON1,
+ T_HS_ZERO_MASK, hs_zero);
+ regmap_update_bits(samsung->regmap, DPHY_MD3_TIME_CON1,
+ T_HS_ZERO_MASK, hs_zero);
+ }
+
+ return count;
+}
+static DEVICE_ATTR_RW(hs_zero_or_prebegin_3);
+
+static ssize_t
+hs_prepare_or_prepare_3_show(struct device *device, struct device_attribute
*attr, char *buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int hs_prepare;
+
+ regmap_read(samsung->regmap, COMBO_MD0_TIME_CON1, &val);
+ hs_prepare = val & GENMASK(7, 0);
+
+ return sprintf(buf, "%d\n", hs_prepare);
+}
+
+static ssize_t hs_prepare_or_prepare_3_store(struct device *device, struct
device_attribute *attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+ unsigned long hs_prepare;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+ hs_prepare = T_HS_PREPARE(val);
+ regmap_update_bits(samsung->regmap, COMBO_MD0_TIME_CON1,
+ T_HS_PREPARE_MASK, hs_prepare);
+ regmap_update_bits(samsung->regmap, COMBO_MD1_TIME_CON1,
+ T_HS_PREPARE_MASK, hs_prepare);
+ regmap_update_bits(samsung->regmap, COMBO_MD2_TIME_CON1,
+ T_HS_PREPARE_MASK, hs_prepare);
+
+ if (!samsung->c_option) {
+ regmap_update_bits(samsung->regmap, DPHY_MC_TIME_CON1,
+ T_HS_PREPARE_MASK, hs_prepare);
+ regmap_update_bits(samsung->regmap, DPHY_MD3_TIME_CON1,
+ T_HS_PREPARE_MASK, hs_prepare);
+ }
+
+ return count;
+}
+static DEVICE_ATTR_RW(hs_prepare_or_prepare_3);
+
+static ssize_t
+lpx_show(struct device *device, struct device_attribute *attr, char *buf)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned int val;
+ unsigned int lpx;
+
+ regmap_read(samsung->regmap, COMBO_MD0_TIME_CON0, &val);
+ lpx = (val & GENMASK(11, 4)) >> 4;
+
+ return sprintf(buf, "%d\n", lpx);
+
+}
+
+static ssize_t lpx_store(struct device *device, struct device_attribute *attr,
+ const char *buf, size_t count)
+{
+ struct samsung_mipi_dcphy *samsung = dev_get_drvdata(device);
+ unsigned long val;
+ unsigned long lpx = 0;
+
+ if (kstrtoul(buf, 10, &val))
+ return -EINVAL;
+
+ lpx |= T_LPX(val);
+ /* T_LP_EXIT_SKEW/T_LP_ENTRY_SKEW unconfig */
+ regmap_write(samsung->regmap, COMBO_MD0_TIME_CON0, lpx);
+ regmap_write(samsung->regmap, COMBO_MD1_TIME_CON0, lpx);
+ regmap_write(samsung->regmap, COMBO_MD2_TIME_CON0, lpx);
+
+ if (!samsung->c_option) {
+ regmap_write(samsung->regmap, DPHY_MC_TIME_CON0, lpx);
+ regmap_write(samsung->regmap, DPHY_MD3_TIME_CON0, lpx);
+ }
+
+ return count;
+}
+static DEVICE_ATTR_RW(lpx);
+
+static struct attribute *samsung_mipi_dcphy_cts_attrs[] = {
+ &dev_attr_lpx.attr,
+ &dev_attr_hs_prepare_or_prepare_3.attr,
+ &dev_attr_hs_zero_or_prebegin_3.attr,
+ &dev_attr_hs_trail_or_post_3.attr,
+ &dev_attr_hs_exit.attr,
+ &dev_attr_output_voltage.attr,
+ &dev_attr_res_up.attr,
+ &dev_attr_res_dn.attr,
+ &dev_attr_cap_peaking.attr,
+ &dev_attr_reg_400m.attr,
+ NULL
+};
+
+static const struct attribute_group samsung_mipi_dcphy_cts_attr_group = {
+ .attrs = samsung_mipi_dcphy_cts_attrs,
+};
+
+static int samsung_mipi_dcphy_cts_sysfs_add(struct samsung_mipi_dcphy *samsung)
+{
+ struct device *dev = samsung->dev;
+ int ret;
+
+ ret = sysfs_create_group(&dev->kobj, &samsung_mipi_dcphy_cts_attr_group);
+ if (ret) {
+ dev_err(dev, "failed to register sysfs. err: %d\n", ret);
+ return ret;
+ };
+
+ return 0;
+}
+
static void samsung_mipi_dcphy_bias_block_enable(struct samsung_mipi_dcphy
*samsung)
{
regmap_write(samsung->regmap, BIAS_CON0, 0x0010);
@@ -1912,6 +2346,11 @@ static int samsung_mipi_dcphy_probe(struct platform_device
*pdev)
return PTR_ERR(phy_provider);
}
+
+ ret = samsung_mipi_dcphy_cts_sysfs_add(samsung);
+ if (ret)
+ return ret;
+
pm_runtime_enable(dev);
return 0;
19.10.2 驱动强度
echo level > output_voltage
驱动默认如下配置:
- D-PHY: 2'b00
- C-PHY: 2'b10
level 参考如下:
- 2b'00 : 400mV
- 2b'01 : 200mV
- 2b'10 : 530mV
- 2b'11 : 530mV
19.10.3 共模电压
level 参考如下:
- 3'b000: 380mV / 230mV
- 3'b001: 390mV / 220mV
- 3'b010: 400mV / 210mV
- 3'b011: 410mV / 200mV
- 3'b100: 420mV / 190mV
- 3'b101: 430mV / 180mV
- 3'b110: 440mV / 170mV
- 3'b111: 450mV / 160mV
19.10.4 Cap Peaking
echo level > cap_peaking
level: 0~7
19.10.5 信号 Timing
如下图中信号红⾊框中的信号参数都是可以调整的。
如下信号调整count值可以在回读基础上做调整修改,比如Tlpx:
cat lpx
19.10.5.1 Tlpx
echo count > lpx
19.10.5.2 Ths_prepare_or_prepare_3
echo count > hs_prepare_or_prepare_3
19.10.5.3 Ths_zero_or_prebegin_3
echo count > hs_zero_or_prebegin_3
19.10.5.4 Ths_trail_or_post_3
echo count > hs_trail_or_post_3
19.10.5.5 Ths_exit
echo count > hs_exit
19.10.6 High-Speed Driver Up Resistor Control
echo level > res_up
level 参考如下:
- 4'b0000: 43 ohm
- 4'b0001: 46 ohm
- 4'b0010: 49 ohm
- 4'b0011: 52 ohm
- 4'b0100: 56 ohm
- 4'b0101: 60 ohm
- 4'b0110: 66 ohm
- 4'b0111: 73 ohm
- 4'b1000: 30 ohm
- 4'b1001: 31.2 ohm
- 4'b1010: 32.5 ohm
- 4'b1011: 34 ohm
- 4'b1100: 35.5 ohm
- 4'b1101: 37 ohm
- 4'b1110: 39 ohm
- 4'b1111: 41 ohm
19.10.7 High-Speed Driver Down Resistor Control
echo level > res_dn
level 参考如下:
- 4'b0000: 43 ohm
- 4'b0001: 46 ohm
- 4'b0010: 49 ohm
- 4'b0011: 52 ohm
- 4'b0100: 56 ohm
- 4'b0101: 60 ohm
- 4'b0110: 66 ohm
- 4'b0111: 73 ohm
- 4'b1000: 30 ohm
- 4'b1001: 31.2 ohm
- 4'b1010: 32.5 ohm
- 4'b1011: 34 ohm
- 4'b1100: 35.5 ohm
- 4'b1101: 37 ohm
- 4'b1110: 39 ohm
- 4'b1111: 41 ohm