
PWM
Introduction to PWM configuration and debugging methods
Module Introduction
The pwm controller is an electronic component that controls the output signal by changing the width of the electrical pulse.
Function Introduction
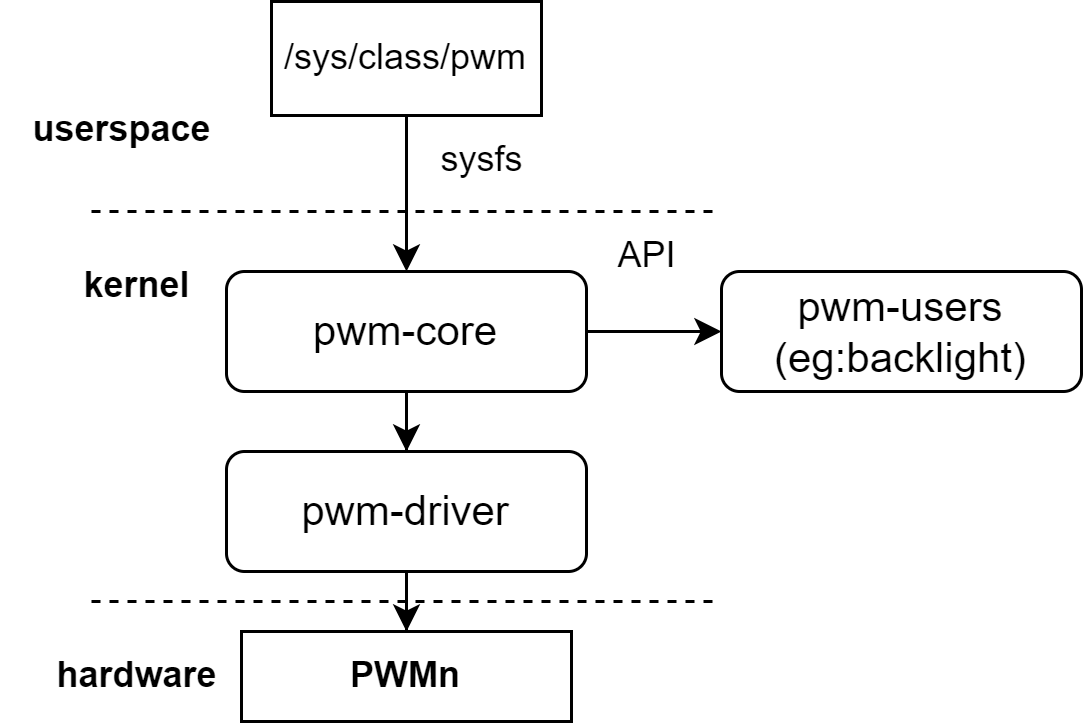 The kernel provides interfaces through the pwm framework layer so that other modules can request the pwm controller and control the output level of the pwm signal.
For example: kernel fan speed control and backlight brightness can both be controlled by pwm.
The kernel provides interfaces through the pwm framework layer so that other modules can request the pwm controller and control the output level of the pwm signal.
For example: kernel fan speed control and backlight brightness can both be controlled by pwm.
Source Code Structure Introduction
The pwm controller driver code is under the drivers/pwm directory:
drivers/pwm
|--core.c # Kernel pwm framework interface code
|--pwm-sysfs.c # Kernel pwm framework registration to sysfs code
|--pwm-pxa.c # k1 pwm driver
Key Features
| Feature |
|---|
| Can generate pwm signals from 200HZ to 6.4MHZ |
| k1 platform supports 20 configurable pwm channels |
Configuration Introduction
Mainly includes driver enable configuration and dts configuration
CONFIG configuration
CONFIG_PWM This is to provide support for the kernel platform pwm framework. It should be set to Y when supporting the k1 pwm driver.
Symbol: PWM [=y]
Device Drivers
-> Pulse-Width Modulation (PWM) Support (PWM [=y])
After supporting the platform-level pwm framework, configure CONFIG_PWM_PXA to Y to support the k1 pwm driver
Symbol: PWM_PXA [=y]
->PXA PWM support (PWM_PXA [=y])
dts configuration
Due to the similar usage and configuration methods of the 20 pwm channels, pwm0 is taken as an example here
pinctrl
Refer to the configured pwm node in the arch/riscv/boot/dts/spacemit/k1-x_pinctrl.dtsi file of the linux repository, as follows:
pinctrl_pwm0_1: pwm0_1_grp {
pinctrl-single,pins =<
K1X_PADCONF(GPIO_14, MUX_MODE3, (EDGE_NONE | PULL_UP | PAD_1V8_DS2)) /* pwm0 */
>;
};
dtsi configuration example
Configure the base address and clock reset resources of the pwm controller in the dtsi, normally no changes are required
1351 pwm0: pwm@d401a000 {
1352 compatible = "spacemit,k1x-pwm";
1353 reg = <0x0 0xd401a000 0x0 0x10>;
1354 #pwm-cells = <1>;
1355 clocks = <&ccu CLK_PWM0>;
1356 resets = <&reset RESET_PWM0>;
1357 k1x,pwm-disable-fd;
1358 status = "disabled";
1359 };
dts configuration example
The complete dts configuration is as follows
807 &pwm0 {
808 pinctrl-names = "default";
809 pinctrl-0 = <&pinctrl_pwm0_1>;
810 status = "okay";
811 };
Interface Introduction
API Introduction
The linux kernel implements the reference and adjustment of pwm for other devices or frameworks such as backlight, led lights, etc. Commonly used:
struct pwm_device *devm_pwm_get(struct device *dev, const char *con_id)
This interface implements the acquisition of pwm resources from the pwm framework
int pwm_apply_state(struct pwm_device *pwm, const struct pwm_state *state)
This interface implements the setting of the pwm state
Debug Introduction
Pwm provides a non-programmable usage method to the user layer through sysfs, which can be tested by connecting the above-mentioned pwm corresponding pin to an adjustable speed fan. The process is as follows The following is verified based on the bianbu linux system
# cd /sys/class/pwm/
# ls # Each node represents a led light
pwmchip0 pwmchip1 pwmchip2 pwmchip3 pwmchip4 pwmchip5 pwmchip6
# echo 0 > pwmchip0/export
# ls pwmchip0/pwm0/
capture enable polarity uevent
duty_cycle period power
# Set the period of the PWM, in ns, that is, a period of 1KHZ
# echo 1000000 > pwmchip0/pwm0/period
# Set the PWM duty cycle
# echo 500000 > pwmchip0/pwm0/duty_cycle
# Enable PWM
# echo 1 > pwmchip0/pwm0/enable
# Adjust the duty cycle, at this time the fan speed decreases
# echo 50000 > pwmchip0/pwm0/duty_cycle
# Turn off PWM
# echo 0 > pwmchip0/pwm0/enable
- It should be noted that the available pwmchipx in sysfs are all unused pwms. If the pwm has been申请通过类似pwm_get的接口申请,则该pwm无法通过sysfs配置
Test Introduction
The high and low signal levels output by pwm can be adjusted by controlling the duty cycle.
Actual tests can be conducted using the pwm nodes under sysfs and an adjustable speed pwm fan.