ROS2 Installation
Set locale
Make sure you have a locale which supports UTF-8. If you are in a minimal environment (such as a docker container), the locale may be something minimal like POSIX. We test with the following settings. However, it should be fine if you’re using a different UTF-8 supported locale.
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
Setup Sources
You will need to add the ROS 2 apt repository to your system.
First ensure that the Ubuntu Universe repository is enabled.
sudo apt install software-properties-common
sudo add-apt-repository universe
Now add the ROS 2 GPG key with apt.
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
Then add the repository to your sources list.
If you encounter the error "Failed to connect to raw.githubusercontent.com port 443 after 13 ms: Connection refused", you can refer to https://www.guyuehome.com/37844 The handling method:
sudo vi /etc/hosts
#####################
127.0.0.1 localhost
127.0.1.1 iron-virtual-machine
### Add the following resolution
185.199.108.133 raw.githubusercontent.com
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
Install ROS 2 packages
Update your apt repository caches after setting up the repositories.
sudo apt update
ROS 2 packages are built on frequently updated Ubuntu systems. It is always recommended that you ensure your system is up to date before installing new packages.
sudo apt upgrade
Desktop Install (Recommended): ROS, RViz, demos, tutorials.
sudo apt install ros-foxy-desktop
Environment setup
Sourcing the setup script
Set up your environment by sourcing the following file.
# Replace ".bash" with your shell if you're not using bash
# Possible values are: setup.bash, setup.sh, setup.zsh
$ source /opt/ros/humble/setup.bash
$ echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
Try some examples
If you installed ros-foxy-desktop above you can try some examples.
In one terminal, source the setup file and then run a C++ talker:
ros2 run demo_nodes_cpp talker
In another terminal source the setup file and then run a Python listener:
ros2 run demo_nodes_py listener
You should see the talker saying that it’s Publishing messages and the listener saying I heard those messages. This verifies both the C++ and Python APIs are working properly. Hooray!
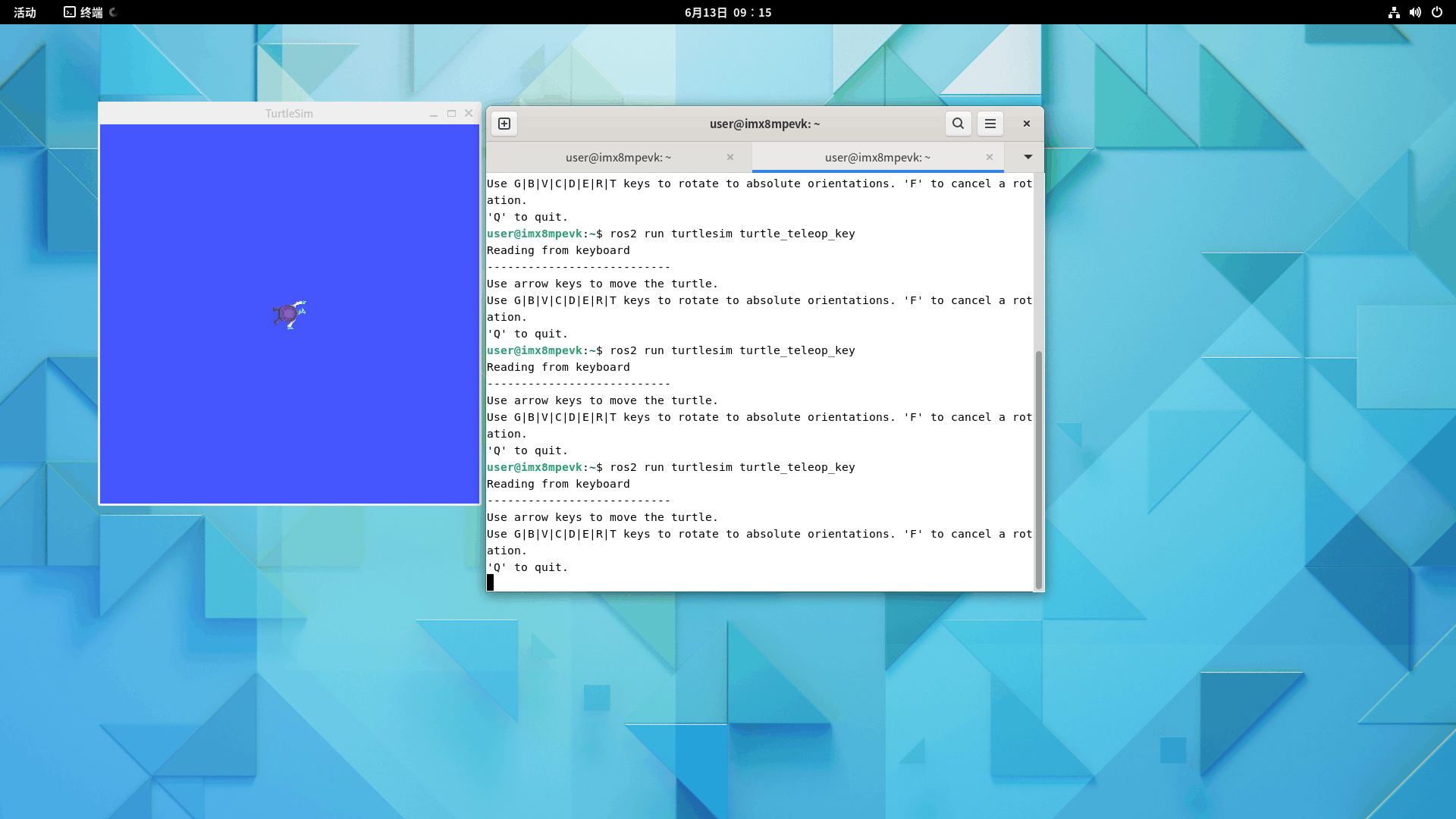
Example 2:
Little Turtle Simulation Example Let's try again the classic example in ROS - the little turtle simulator.
Start two terminals and run the following instructions respectively:
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key